溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇文章主要介紹了Apollo預測模塊的體系結構是什么的相關知識,內容詳細易懂,操作簡單快捷,具有一定借鑒價值,相信大家閱讀完這篇Apollo預測模塊的體系結構是什么文章都會有所收獲,下面我們一起來看看吧。
一、簡介
預測模塊是研究并預測感知模塊檢測到的所有障礙物的行為。預測模塊接收障礙物數據以及基本的感知信息,包括位置、方向、速度、加速度,然后為這些感知到的障礙物生成概率預測軌跡。
注意:預測模塊只預測障礙物的行為, 而不預測汽車本身。規劃模塊規劃汽車本身的軌跡。
從感知模塊得到的障礙物信息。
從定位模塊得到的位置信息。
從規模模塊得到的之前計算周期的規劃軌跡。
帶有預測軌跡及其優先級的障礙物,因為各個獨立場景的優先級不同,現階段的方案也要計算障礙物優先級。優先級包括:忽略、謹慎和正常 (默認) 。
如下圖所示,預測模塊由四個主要功能模塊組成:容器、場景分析器、評估器和預測器。Apollo 3.0中已經有容器、評估器和預測器。在Apollo 3.5中,因為我們已經采用一個基于多場景的方法來提升Apollo的自動駕駛能力,所以引入了場景功能模塊。
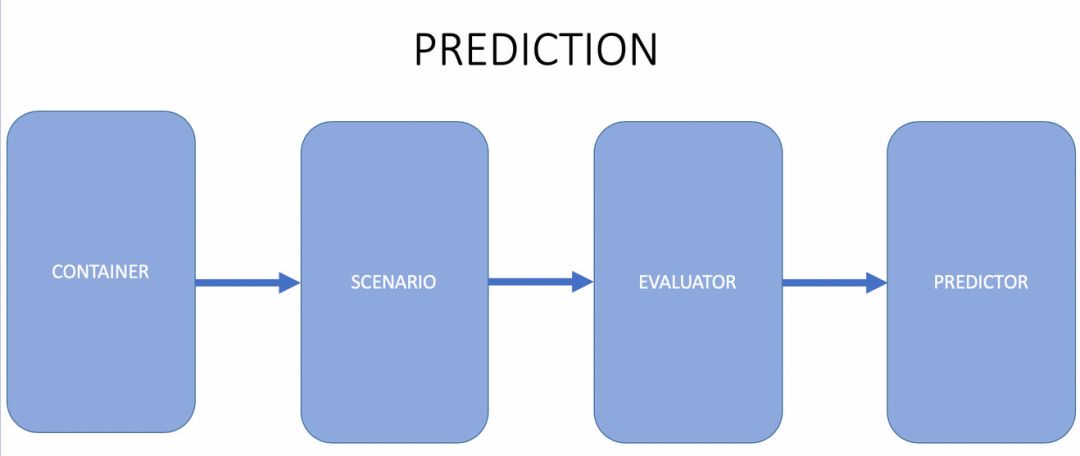
▲預測模塊的組成
容器存儲來自訂閱通道的輸入數據,當前支持的輸入包括感知障礙物、自車定位信息和自車規劃軌跡。

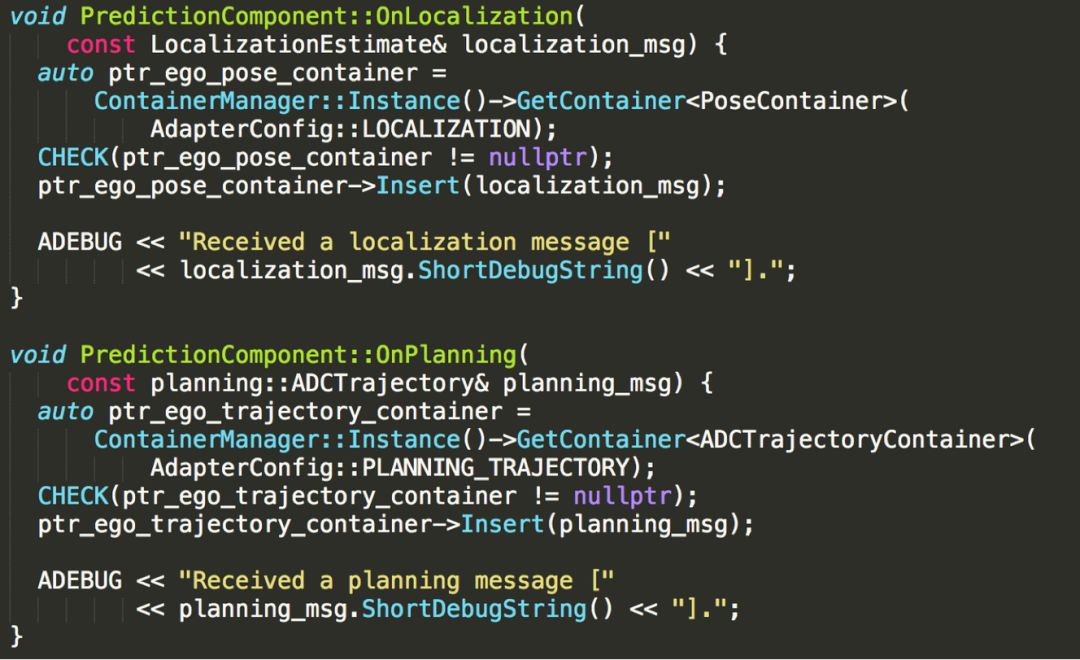
預測模塊同樣采用定位模塊和規劃模塊的輸出信息作為輸入,其結構如下所示:
關于“Apollo預測模塊的體系結構是什么”這篇文章的內容就介紹到這里,感謝各位的閱讀!相信大家對“Apollo預測模塊的體系結構是什么”知識都有一定的了解,大家如果還想學習更多知識,歡迎關注億速云行業資訊頻道。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





