溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇文章主要介紹“FreeRTOS實時操作系統的多優先級怎么實現”的相關知識,小編通過實際案例向大家展示操作過程,操作方法簡單快捷,實用性強,希望這篇“FreeRTOS實時操作系統的多優先級怎么實現”文章能幫助大家解決問題。
FreeRTOS中,數字優先級越小,邏輯優先級也越小,空閑任務優先級為0.
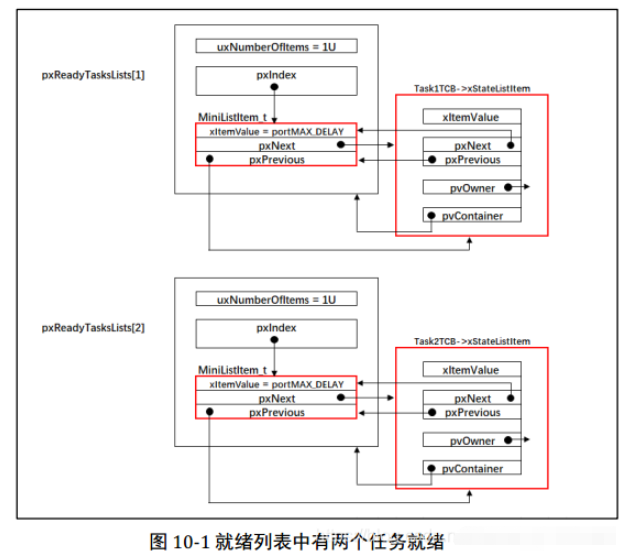
List_t pxReadyTasksLists[configMAX_PRIORITIES]是數組,數組下標代表任務優先級,任務創建是根據設置的任務優先級插入到對應下標的列表根節點上,如下。
要支持多優先級,就是再任務切換時讓pxCurrentTCB指向最高優先級的TCB即可,之前時手動再任務1、任務2來回切換,現在問題就是怎么找到優先級最高的就緒任務TCB。有2套方法,軟件通用方法和硬件指令方法
通過configUSE_PORT_OPTIMISED_TASK_SELECTION指定使用軟件通用方法還是硬件指令方法,代碼再task.c中
#if ( configUSE_PORT_OPTIMISED_TASK_SELECTION == 0 )//使用通用方法
/* uxTopReadyPriority 是全局變量,保存著最高優先級 */
#define taskRECORD_READY_PRIORITY( uxPriority ) \
{ \
if( ( uxPriority ) > uxTopReadyPriority ) \
{ \
uxTopReadyPriority = ( uxPriority ); \
} \
} /* taskRECORD_READY_PRIORITY */
/*-----------------------------------------------------------*/
#define taskSELECT_HIGHEST_PRIORITY_TASK() \
{ \
/* 從高到底依次尋找非空的列表根節點下標 */ \
while( listLIST_IS_EMPTY( &( pxReadyTasksLists[ uxTopReadyPriority ] ) ) ) \
{ \
configASSERT( uxTopReadyPriority ); \
--uxTopReadyPriority; \
} \
\
/* 更新pxCurrentTCB 和*/ \
listGET_OWNER_OF_NEXT_ENTRY( pxCurrentTCB, &( pxReadyTasksLists[ uxTopReadyPriority ] ) ); \
} /* taskSELECT_HIGHEST_PRIORITY_TASK */
/*-----------------------------------------------------------*/
/* 對于軟件方式這里做空*/
#define taskRESET_READY_PRIORITY( uxPriority )
#define portRESET_READY_PRIORITY( uxPriority, uxTopReadyPriority )
#else /* configUSE_PORT_OPTIMISED_TASK_SELECTION */
/* 硬件指令方式 */
/* 根據uxPriority來更新uxTopReadyPriority,記錄下最高優先級*/
#define taskRECORD_READY_PRIORITY( uxPriority ) portRECORD_READY_PRIORITY( uxPriority, uxTopReadyPriority )
/*-----------------------------------------------------------*/
#define taskSELECT_HIGHEST_PRIORITY_TASK() \
{ \
UBaseType_t uxTopPriority; \
\
/* 尋找優先級最高的任務TCB來更新pxCurrentTCB */ \
portGET_HIGHEST_PRIORITY( uxTopPriority, uxTopReadyPriority ); \
configASSERT( listCURRENT_LIST_LENGTH( &( pxReadyTasksLists[ uxTopPriority ] ) ) > 0 ); \
listGET_OWNER_OF_NEXT_ENTRY( pxCurrentTCB, &( pxReadyTasksLists[ uxTopPriority ] ) ); \
} /* taskSELECT_HIGHEST_PRIORITY_TASK() */
/*-----------------------------------------------------------*/
/* 清除uxTopReadyPriority的uxPriority 位. */
#define taskRESET_READY_PRIORITY( uxPriority ) \
{ \
if( listCURRENT_LIST_LENGTH( &( pxReadyTasksLists[ ( uxPriority ) ] ) ) == ( UBaseType_t ) 0 ) \
{ \
portRESET_READY_PRIORITY( ( uxPriority ), ( uxTopReadyPriority ) ); \
} \
}
#endif /* configUSE_PORT_OPTIMISED_TASK_SELECTION */下面看著幾個port接口
#define portRECORD_READY_PRIORITY( uxPriority, uxReadyPriorities ) \ ( uxReadyPriorities ) |= ( 1UL << ( uxPriority ) ) #define portRESET_READY_PRIORITY( uxPriority, uxReadyPriorities ) \ ( uxReadyPriorities ) &= ~( 1UL << ( uxPriority ) )
可以看到硬件方式是把uxTopReadyPriority 看作一個位圖,每位代表一個優先級,一共32bit,任務就緒是就把對應位置1,反之清0.

所以獲得最高就緒優先級的硬件方法如下(利用clz指令,計算一個變量從高位開始第一次出現1的位前面0的個數,上圖clz(uxReadyPriorities)=6)
#define portGET_HIGHEST_PRIORITY( uxTopPriority, uxReadyPriorities)\ uxTopPriority = ( 31 - __clz( ( uxReadyPriorities ) ) )
關于“FreeRTOS實時操作系統的多優先級怎么實現”的內容就介紹到這里了,感謝大家的閱讀。如果想了解更多行業相關的知識,可以關注億速云行業資訊頻道,小編每天都會為大家更新不同的知識點。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





