溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇文章主要介紹“Python和Matlab如何實現蝙蝠算法”的相關知識,小編通過實際案例向大家展示操作過程,操作方法簡單快捷,實用性強,希望這篇“Python和Matlab如何實現蝙蝠算法”文章能幫助大家解決問題。
蝙蝠算法是2010年楊教授基于群體智能提出的啟發式搜索算法,是一種搜索全局最優解的有效方法。該算法基于迭代優化,初始化為一組隨機解,然后迭代搜尋最優解,且在最優解周圍通過隨機飛行產生局部新解,加強局部搜索速度。該算法具有實現簡單、參數少等特點。
該算法主要用于目標函數尋優,基于蝙蝠種群利用產生的聲波搜索獵物和控制飛行方向的特征來實現函數的尋優。以一只蝙蝠作為基本單元,且每只蝙蝠都有一個適應值來對函數解空間進行優化。每只蝙蝠可以調整自身發射聲波的響度、頻率等對空間進行搜索,使整個種群的活動逐步由無序變為有序。但蝙蝠算法在尋優末段容易陷入局部的極值,本文引入變速度權重因子修正系數(和粒子群參數調整的自適應過程相似),盡可能避免局部極值的困境,從而達到全局尋優的效果。
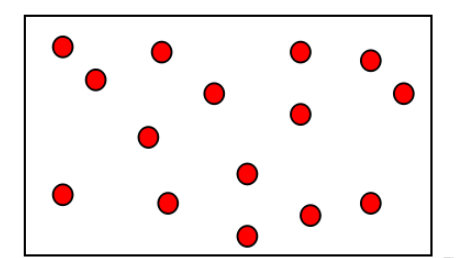
首先在自變量范圍內產生蝙蝠的隨機位置;
然后每個蝙蝠向周圍某處移動,飛行靠聲波反饋來更變方向,又向周圍移動是隨機的,蝙蝠下一時刻移動到某一位置有一定的出現頻率,所以本文在運動公式中加了聲波和頻率兩個因素。每一時刻的位移看作是一次飛行,每次飛行的距離很短(距離長短反映出搜素精度)。
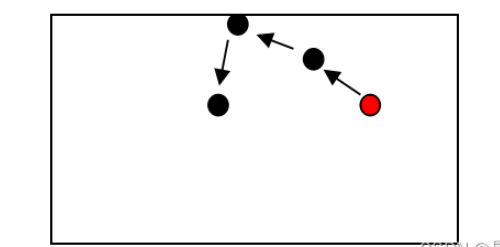
每只蝙蝠初始位置是隨機的,在初始位置時刻其中一只蝙蝠對應的函數最值,算法開始會記錄該位置,然后所有蝙蝠逐漸向該位置靠近,飛行方向大致向當前最值方向(即該方向的位置該蝙蝠的出現頻率更高),但是在飛行方向也是隨機飛行的,相當于逐步搜索過去。蝙蝠飛行過程中不會因為當前飛行出現的最大值位置而改變種群的飛行趨勢,這樣可以盡量避免算法陷入局部極值。
算法每飛行一次就記錄一次種群所處位置的最值,最后找出記錄中的最值。
算法有兩個參數可以影響最終的結果:種群數量和飛行次數。其中種群數量的影響是最大的。
3.1 初始化相關參數
蝙蝠的位置為Xi,飛行速度Vi,聲音響度為Ai,頻率yi范圍,設有目標函數為 :

3.2 更改脈沖頻率產生的解并更變蝙蝠位置與飛行速度
蝙蝠i在t-1時的位置和飛行速度分別表示為 和
和 ,群體當前找到的最優位置為
,群體當前找到的最優位置為 。接著根據自身發出不同的音響搜尋獵物,通過接受反饋信息來調整位置xi和飛行速度v(i)。其飛行的速度更變公式如下:
。接著根據自身發出不同的音響搜尋獵物,通過接受反饋信息來調整位置xi和飛行速度v(i)。其飛行的速度更變公式如下:
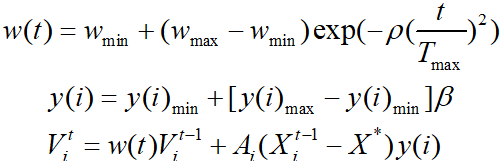
w(t)其中為時刻變速慣性權重因子,作用是使蝙蝠的前期搜索對后期搜索提供參照,wmax為w(t)的最大值、wmin為w(t)的最小值; ,一般取2,Tmax為最大迭代次數;為當前位置最優解;y(i)為頻率滿足正態均勻分布的一個隨機數,β是一個隨機變量,且
,一般取2,Tmax為最大迭代次數;為當前位置最優解;y(i)為頻率滿足正態均勻分布的一個隨機數,β是一個隨機變量,且 。開始運行時,蝙蝠在
。開始運行時,蝙蝠在 隨機進行頻率分配。
隨機進行頻率分配。

為控制蝙蝠所處位置在自變量范圍內,本文針對該情況設置了邊界規則:如果下次運動的位置超出了自變量范圍,那么下次飛行的位置為投影在的邊界上的位置。
3.3 搜尋局部最優解

3.4 通過蝙蝠多次飛行產生多個新解,進行全局搜索,若得到的新解
那么接受該解。
3.5 排列所有蝙蝠的位置,并找出當前最優值 及對應的位置
及對應的位置
3.6 設當前最優解為 ,然后使所有蝙蝠繼續向下一時刻運動,并返回步驟2重新計算。
,然后使所有蝙蝠繼續向下一時刻運動,并返回步驟2重新計算。
3.7 時刻結束,輸出:最優解
#=========導入相關庫===============
import numpy as np
from numpy.random import random as rand
#========參數設置==============
# objfun:目標函數
# N_pop: 種群規模,通常為10到40
# N_gen: 迭代數
# A: 響度(恒定或降低)
# r: 脈沖率(恒定或減小)
# 此頻率范圍決定范圍
# 如有必要,應更改這些值
# Qmin: 頻率最小值
# Qmax: 頻率最大值
# d: 維度
# lower: 下界
# upper: 上界
def bat_algorithm(objfun, N_pop=20, N_gen=1000, A=0.5, r=0.5,
Qmin=0, Qmax=2, d=10, lower=-2, upper=2):
N_iter = 0 # Total number of function evaluations
#=====速度上下限================
Lower_bound = lower * np.ones((1,d))
Upper_bound = upper * np.ones((1,d))
Q = np.zeros((N_pop, 1)) # 頻率
v = np.zeros((N_pop, d)) # 速度
S = np.zeros((N_pop, d))
#=====初始化種群、初始解=======
# Sol = np.random.uniform(Lower_bound, Upper_bound, (N_pop, d))
# Fitness = objfun(Sol)
Sol = np.zeros((N_pop, d))
Fitness = np.zeros((N_pop, 1))
for i in range(N_pop):
Sol[i] = np.random.uniform(Lower_bound, Upper_bound, (1, d))
Fitness[i] = objfun(Sol[i])
#====找出初始最優解===========
fmin = min(Fitness)
Index = list(Fitness).index(fmin)
best = Sol[Index]
#======開始迭代=======
for t in range(N_gen):
#====對所有蝙蝠/解決方案進行循環 ======
for i in range(N_pop):
# Q[i] = Qmin + (Qmin - Qmax) * np.random.rand
Q[i] = np.random.uniform(Qmin, Qmax)
v[i] = v[i] + (Sol[i] - best) * Q[i]
S[i] = Sol[i] + v[i]
#===應用簡單的界限/限制====
Sol[i] = simplebounds(Sol[i], Lower_bound, Upper_bound)
# Pulse rate
if rand() > r:
# The factor 0.001 limits the step sizes of random walks
S[i] = best + 0.001*np.random.randn(1, d)
#====評估新的解決方案 ===========
# print(i)
Fnew = objfun(S[i])
#====如果解決方案有所改進,或者聲音不太大,請更新====
if (Fnew <= Fitness[i]) and (rand() < A):
Sol[i] = S[i]
Fitness[i] = Fnew
#====更新當前的最佳解決方案======
if Fnew <= fmin:
best = S[i]
fmin = Fnew
N_iter = N_iter + N_pop
print('Number of evaluations: ', N_iter)
print("Best = ", best, '\n fmin = ', fmin)
return best
def simplebounds(s, Lower_bound, Upper_bound):
Index = s > Lower_bound
s = Index * s + ~Index * Lower_bound
Index = s < Upper_bound
s = Index * s + ~Index * Upper_bound
return s
#====目標函數=============
def test_function(u):
a = u ** 2
return a.sum(axis=0)
if __name__ == '__main__':
# print(bat_algorithm(test_function))
bat_algorithm(test_function)
clear wmax=0.9;%慣性權重最大值 wmin=0.4;%慣性權重最小值 n=10000; % 群體大小 A=rand(1,n); % 聲音響度 (不變或者減小) %% 頻率范圍 Qmin=0; % 最低頻率 Qmax=1; % 最高頻率 d=2;% 搜索變量的維數(即頻率和速度) %% 初始矩陣 Q=zeros(n,1); % 頻率矩陣初始化 v=zeros(n,d); % 速度矩陣初始化,初始化意義就是產生一個初始矩陣 %% x自變量范圍 u=-3; o=12.1; % y自變量范圍 p=4.1; l=5.8; %% 初始化群體/解 for i=1:n Sol(i,1)=-3+(12.1+3)*rand(1,1);%x自變量范圍【-3,12.1】 Sol(i,2)=4.1+(5.8-4.1)*rand(1,1);%y自變量【4.1,5.8范圍】 %將隨機生成的兩個自變量帶入函數式 Fitness(i)=Fun(Sol(i,:));%函數值 end %% 尋找當前最優解 [fmax,I]=max(Fitness); best=Sol(I,:); T=100;%飛行次數 %% 開始飛行 for t=1:T for i=1:n, Q(i)=Qmin+(Qmin-Qmax)*rand;%rand均勻分布的隨機數 %v(i,:)=v(i,:)+(Sol(i,:)-best)*Q(i);(原速度) w=(wmax-wmin)*exp(-2*(t/T)^2)+wmin;%慣性權重因子 v(i,:)=w*v(i,:)+(Sol(i,:)-best)*A(i)*Q(i);%更改后的速度 S(i,:)=Sol(i,:)+v(i,:);%位置移動 %% 邊界問題,如果下次飛行超出自變量范圍外了,那么下次飛行的位置為投影在的邊界上的位置 %x軸 if S(i,1)>o S(i,1)=o; end if S(i,1)<u S(i,1)=u; end %y軸 if S(i,2)>l S(i,2)=l; end if S(i,2)<p S(i,2)=p; end %% 評估該次飛行后產生的新解 Fnew(i)=Fun(S(i,:)); end [Fmax,Z]=max(Fnew);%找出該次飛行后產生的最大值 C(t,:)=S(Z,:); FFnew(t)=Fmax; end [Ffmax,N]=max(FFnew);%找出整個飛行過程中的最大值 M=C(N,:) Ffmax
%目標函數 function z=Fun(u) z=21.5+u(1)*sin(4*pi*u(1))+u(2)*sin(20*pi*u(2));

如果是其他函數怎么辦呢?
函數z=21.5+u(1)*sin(4*pi*u(1))+u(2)*sin(20*pi*u(2))中的兩個自變量對應程序中的是Sol(i,1)=-3+(12.1+3)*rand(1,1);%x自變量范圍【-3,12.1】和Sol(i,2)=4.1+(5.8-4.1)*rand(1,1);%y自變量【4.1,5.8范圍】,兩自變量產生的是列矩陣,而程序中Sol(i,:) 提取的是矩陣中的行,所以如果對該函數增減自變量,或者想求其他含有多個自變量的函數,程序中只用修改以下程序部分,其他參數也可以自行更改(注:自變量的范圍和個數增加了,那么種群個數和飛行次數務必要增加):
Sol(i,1)=-3+(12.1+3)*rand(1,1);%x自變量范圍【-3,12.1】
Sol(i,2)=4.1+(5.8-4.1)*rand(1,1);%y自變量【4.1,5.8范圍】
和
% x自變量范圍
u=-3;
o=12.1;
% y自變量范圍
p=4.1;
l=5.8;
關于“Python和Matlab如何實現蝙蝠算法”的內容就介紹到這里了,感謝大家的閱讀。如果想了解更多行業相關的知識,可以關注億速云行業資訊頻道,小編每天都會為大家更新不同的知識點。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





