溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
本篇內容主要講解“Python怎么實現DIY一臺會思考的壁障車”,感興趣的朋友不妨來看看。本文介紹的方法操作簡單快捷,實用性強。下面就讓小編來帶大家學習“Python怎么實現DIY一臺會思考的壁障車”吧!
一、 所需器材:
1、TurnipBit開發板 1塊(TB上可以買到)
2、下載數據線 1條
3、智能小車套件 1套(底盤、車輪、電機等)
4、超聲波模塊(HC-SR04)1個(用作小車的“眼睛”)
5、L298N電機驅動模塊 1個
6、接入互聯網的電腦 1臺(推薦使用Google Chome或者Firefox瀏覽器)
二、壁障車的組裝
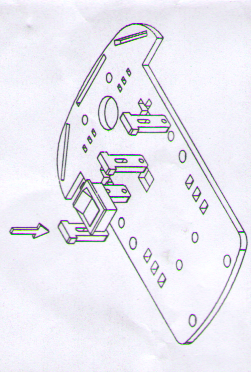
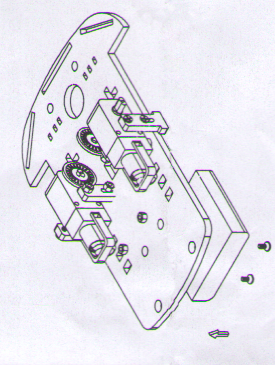
第一步,先把小車底板、緊固件、碼盤的黃色保護紙撕掉,然后把緊固件插入小車底板。
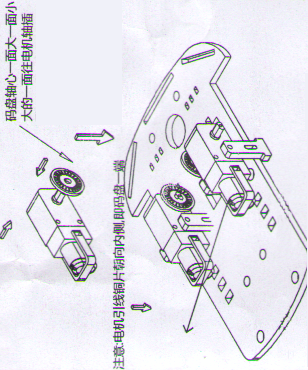
第二步,安裝碼盤,并把電機固定于底板。碼盤軸心一面大一面小,大的一面往電機軸插(注意:電機引線銅片朝向內側,即碼盤一端)。
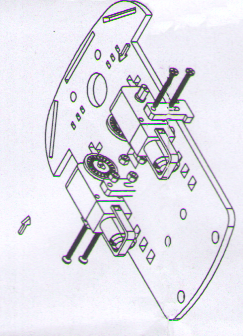
第三步,插入螺絲,把電機固定到小車底板,并擰上螺帽。
第四步,插入螺絲,固定電池盒。本實驗中這一步可以省略,我們使用充電寶進行供電。
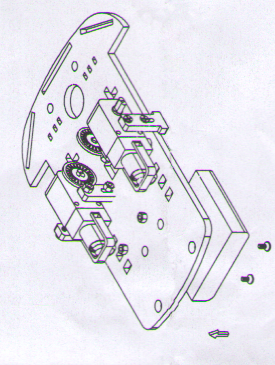
第五步,放入銅柱,擰緊8個螺絲固定萬向輪,手捏住電機(保護緊固件),并往里面插入輪子,組裝完成。
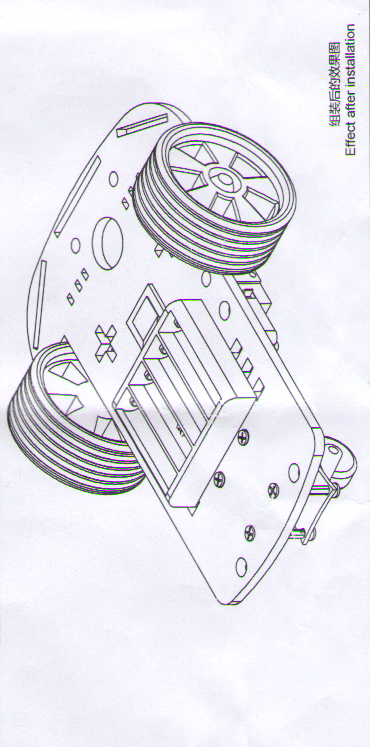
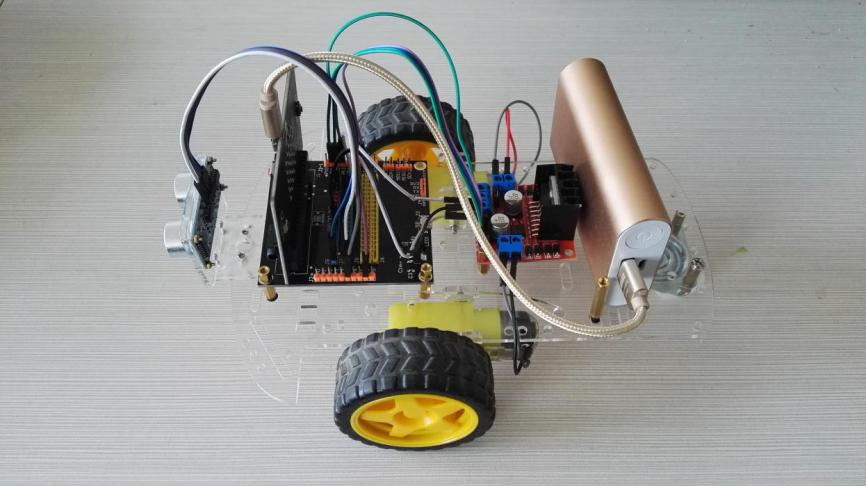
最后,我們來看一下組裝完成的效果圖。
三、電機驅動和超聲波的安裝
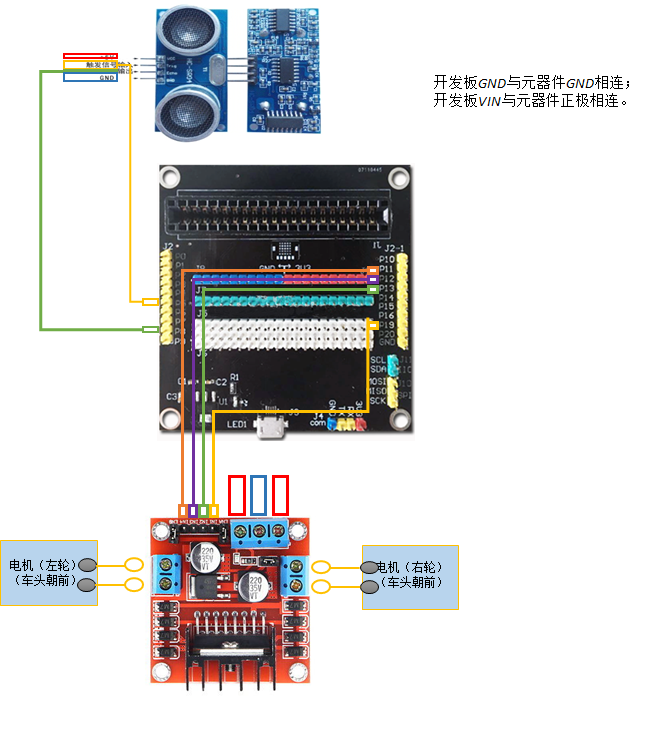
硬件的連接,主要是各引腳間的連接。具體為(詳見下表):超聲波模塊共4個引腳,分別是VCC、GND、Trig和Echo。VCC接TurnipBit擴展板的+5V引腳,GND接TurnipBit擴展板的GND引腳,Trig觸發引腳接P5,Echo回傳引腳接P8。L298N電機驅動模塊左側OUT3、OUT4接線端子對應接入左輪電機的下側、上側側銅片,右側也是。L298N的輸入端IN1、IN2、IN3、IN4分別接入擴展板的P19、P13、P12、P11。最后,本實驗利用充電寶進行供電,只需將充電板通過usb線連接TurnipBit開發板的microusb口即可。

四、拼插編程
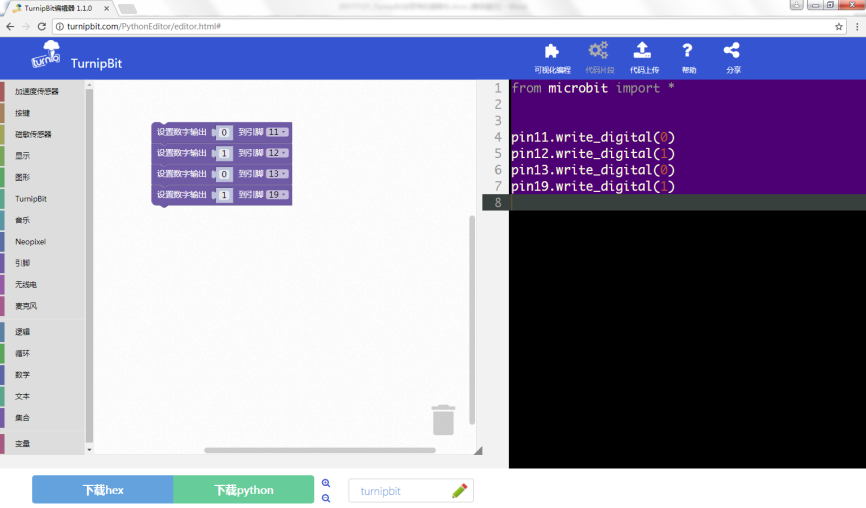
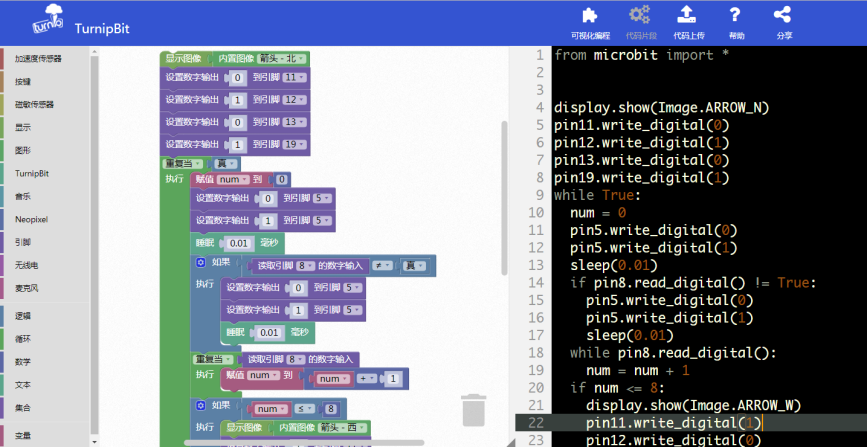
步驟1:因為P11和P12控制一個車輪,P13和P19控制一個車輪,只需要給相應車輪的P12和P19高電平,另外兩個引腳低高平,避障車兩個車輪就會轉動,如果此時轉動方向兩個輪子不同或者是向后,說明你在連線時沒有注意連接的L298N的引腳,只需要調換一下,避障車就會向前走,如下圖。
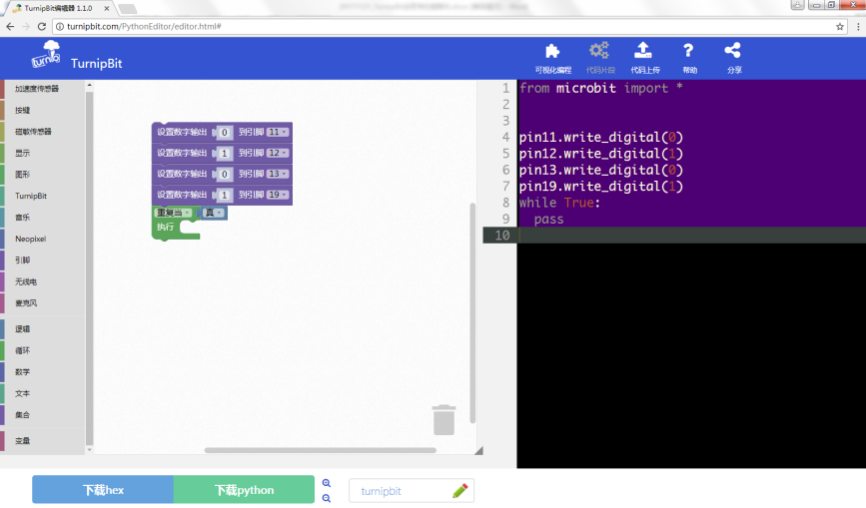
步驟2:添加一個死循環,使程序一直運行。
步驟3:接下來就需要完成檢測障礙物的功能,這部分需要超聲波模塊來實現。我們需要在死循環內添加障礙物檢測的內容,讓避障車一直不斷的檢測與前方障礙物的距離。
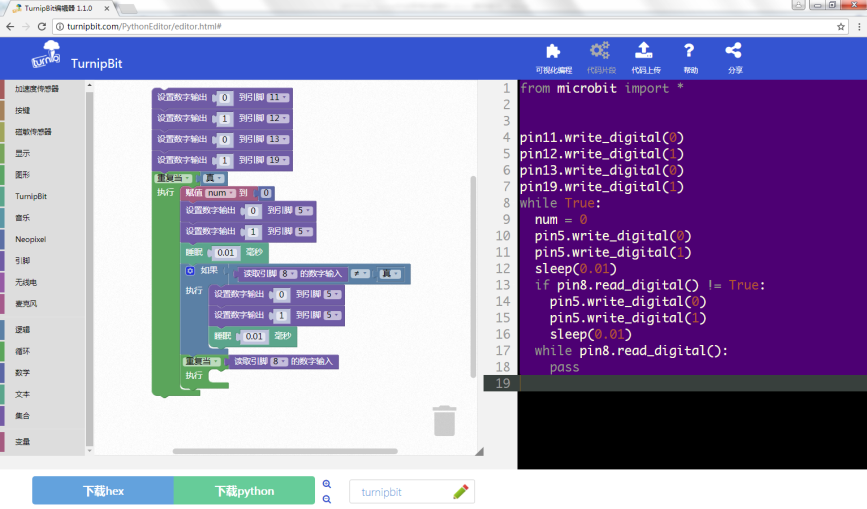
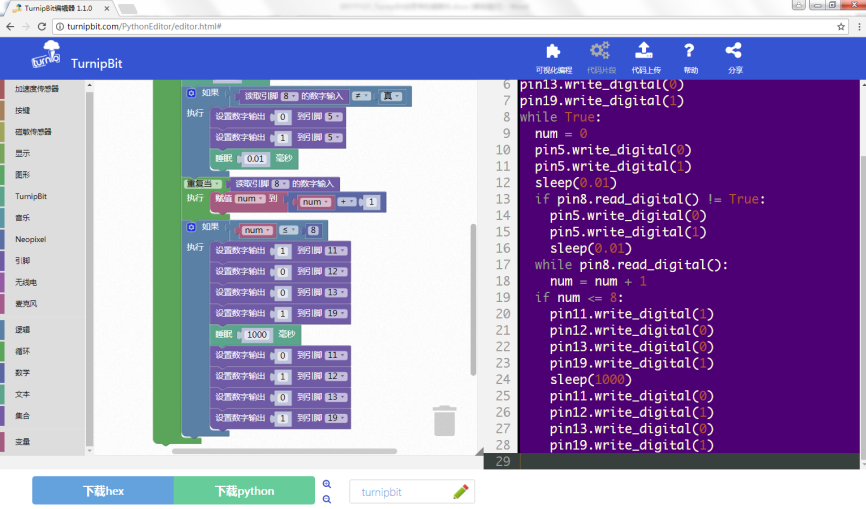
步驟4:為了更簡單、方便、快捷的實現功能,我們采用計數的方式,測量一個大概的距離,然后進行判定是否進行避障。細心的同學可能會發現我們在程序一開始的時候定義了一個num的變量,我們就用num來計數。當引腳8為高電平時,表示超聲波模塊的echo進入接收模式,我們就不斷的讓num自加1,一直等到超聲波模塊接收到返回的信號,即引腳8為低電平時,停止計數。這里的num就能反映出當前小車與障礙物之間的距離。這里以25厘米為安全距離進行測試,發現num的數值為8。于是說明,如果小車與障礙物之間的距離小于25厘米時,num就小于8。所以程序中判斷如果num的值小于或等于8時,就進行轉向避障。
步驟5:到此,會思考的避障車已經完成了。為了讓避障車更加炫酷,我們可以使用LED屏來動態顯示當前避障車行駛的方向。方法是在小車做出轉向動作前,先用箭頭來顯示轉向的方向,然后再做動作。
步驟6:將程序名修改成turnipbit-car,點擊【下載hex】按鈕將程序保存到電腦里。把保存的turnipbit- car.hex文件拖入TurnipBit磁盤中,我們會看到TurnipBit板子上的燈在閃爍,說明正在下載到控制板中。下載成功后,將TurnipBit正確插入TurnipBit擴展板的金手指卡槽內,開始啟動避障車吧。
到此,相信大家對“Python怎么實現DIY一臺會思考的壁障車”有了更深的了解,不妨來實際操作一番吧!這里是億速云網站,更多相關內容可以進入相關頻道進行查詢,關注我們,繼續學習!
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





