溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇文章將為大家詳細講解有關python怎么實現梯度下降算法,小編覺得挺實用的,因此分享給大家做個參考,希望大家閱讀完這篇文章后可以有所收獲。
梯度下降(Gradient Descent)算法是機器學習中使用非常廣泛的優化算法。當前流行的機器學習庫或者深度學習庫都會包括梯度下降算法的不同變種實現。
本文主要以線性回歸算法損失函數求極小值來說明如何使用梯度下降算法并給出python實現。若有不正確的地方,希望讀者能指出。
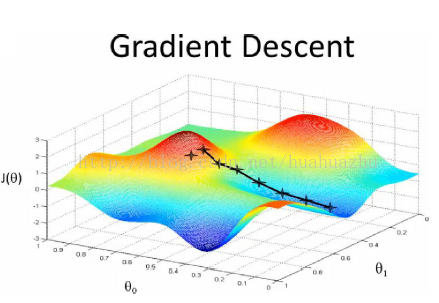
梯度下降
梯度下降原理:將函數比作一座山,我們站在某個山坡上,往四周看,從哪個方向向下走一小步,能夠下降的最快。
在線性回歸算法中,損失函數為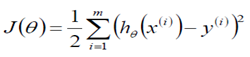
在求極小值時,在數據量很小的時候,可以使用矩陣求逆的方式求最優的θ值。但當數據量和特征值非常大,例如幾萬甚至上億時,使用矩陣求逆根本就不現實。而梯度下降法就是很好的一個選擇了。
使用梯度下降算法的步驟:
1)對θ賦初始值,這個值可以是隨機的,也可以讓θ是一個全零的向量。
2)改變θ的值,使得目標損失函數J(θ)按梯度下降的方向進行減少。
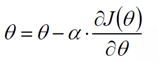
其中為學習率或步長,需要人為指定,若過大會導致震蕩即不收斂,若過小收斂速度會很慢。
3)當下降的高度小于某個定義的值,則停止下降。
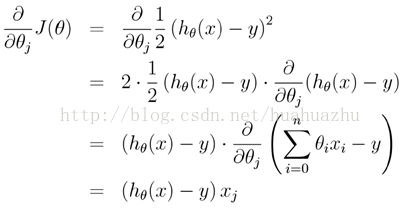
另外,對上面線性回歸算法損失函數求梯度,結果如下:
在實際應用的過程中,梯度下降算法有三類,它們不同之處在于每次學習(更新模型參數)使用的樣本個數,每次更新使用不同的樣本會導致每次學習的準確性和學習時間不同。下面將分別介紹原理及python實現。
批量梯度下降(Batch gradient descent) ??
每次使用全量的訓練集樣本來更新模型參數,即給定一個步長,然后對所有的樣本的梯度的和進行迭代:
梯度下降算法最終得到的是局部極小值。而線性回歸的損失函數為凸函數,有且只有一個局部最小,則這個局部最小一定是全局最小。所以線性回歸中使用批量梯度下降算法,一定可以找到一個全局最優解。
優點:全局最優解;易于并行實現;總體迭代次數不多
缺點:當樣本數目很多時,訓練過程會很慢,每次迭代需要耗費大量的時間。
隨機梯度下降(Stochastic gradient descent)
隨機梯度下降算法每次從訓練集中隨機選擇一個樣本來進行迭代,即:

隨機梯度下降算法每次只隨機選擇一個樣本來更新模型參數,因此每次的學習是非常快速的,并且可以進行在線更新。
隨機梯度下降最大的缺點在于每次更新可能并不會按照正確的方向進行,因此可以帶來優化波動(擾動)。不過從另一個方面來看,隨機梯度下降所帶來的波動有個好處就是,對于類似盆地區域(即很多局部極小值點)那么這個波動的特點可能會使得優化的方向從當前的局部極小值點跳到另一個更好的局部極小值點,這樣便可能對于非凸函數,最終收斂于一個較好的局部極值點,甚至全局極值點。
優點:訓練速度快,每次迭代計算量不大
缺點:準確度下降,并不是全局最優;不易于并行實現;總體迭代次數比較多。
Mini-batch梯度下降算法
Mini-batch梯度下降綜合了batch梯度下降與stochastic梯度下降,在每次更新速度與更新次數中間取得一個平衡,其每次更新從訓練集中隨機選擇b,b<m個樣本進行學習,即:

python代碼實現
批量梯度下降算法
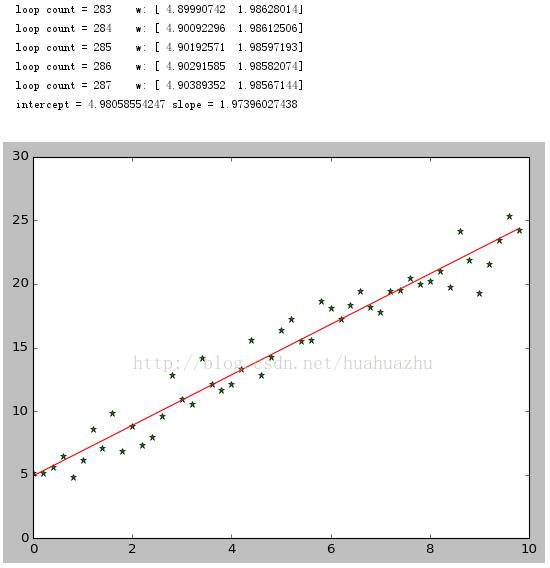
#!/usr/bin/python #coding=utf-8 import numpy as np from scipy import stats import matplotlib.pyplot as plt # 構造訓練數據 x = np.arange(0., 10., 0.2) m = len(x) # 訓練數據點數目 print m x0 = np.full(m, 1.0) input_data = np.vstack([x0, x]).T # 將偏置b作為權向量的第一個分量 target_data = 2 * x + 5 + np.random.randn(m) # 兩種終止條件 loop_max = 10000 # 最大迭代次數(防止死循環) epsilon = 1e-3 # 初始化權值 np.random.seed(0) theta = np.random.randn(2) alpha = 0.001 # 步長(注意取值過大會導致振蕩即不收斂,過小收斂速度變慢) diff = 0. error = np.zeros(2) count = 0 # 循環次數 finish = 0 # 終止標志 while count < loop_max: count += 1 # 標準梯度下降是在權值更新前對所有樣例匯總誤差,而隨機梯度下降的權值是通過考查某個訓練樣例來更新的 # 在標準梯度下降中,權值更新的每一步對多個樣例求和,需要更多的計算 sum_m = np.zeros(2) for i in range(m): dif = (np.dot(theta, input_data[i]) - target_data[i]) * input_data[i] sum_m = sum_m + dif # 當alpha取值過大時,sum_m會在迭代過程中會溢出 theta = theta - alpha * sum_m # 注意步長alpha的取值,過大會導致振蕩 # theta = theta - 0.005 * sum_m # alpha取0.005時產生振蕩,需要將alpha調小 # 判斷是否已收斂 if np.linalg.norm(theta - error) < epsilon: finish = 1 break else: error = theta print 'loop count = %d' % count, '\tw:',theta print 'loop count = %d' % count, '\tw:',theta # check with scipy linear regression slope, intercept, r_value, p_value, slope_std_error = stats.linregress(x, target_data) print 'intercept = %s slope = %s' % (intercept, slope) plt.plot(x, target_data, 'g*') plt.plot(x, theta[1] * x + theta[0], 'r') plt.show()
運行結果截圖:
隨機梯度下降算法
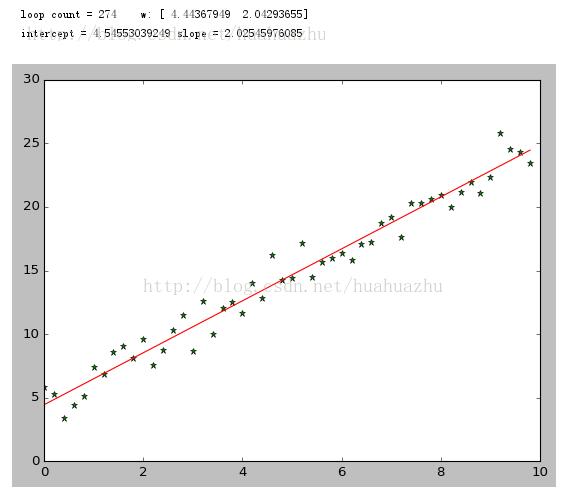
#!/usr/bin/python #coding=utf-8 import numpy as np from scipy import stats import matplotlib.pyplot as plt # 構造訓練數據 x = np.arange(0., 10., 0.2) m = len(x) # 訓練數據點數目 x0 = np.full(m, 1.0) input_data = np.vstack([x0, x]).T # 將偏置b作為權向量的第一個分量 target_data = 2 * x + 5 + np.random.randn(m) # 兩種終止條件 loop_max = 10000 # 最大迭代次數(防止死循環) epsilon = 1e-3 # 初始化權值 np.random.seed(0) theta = np.random.randn(2) # w = np.zeros(2) alpha = 0.001 # 步長(注意取值過大會導致振蕩,過小收斂速度變慢) diff = 0. error = np.zeros(2) count = 0 # 循環次數 finish = 0 # 終止標志 ######-隨機梯度下降算法 while count < loop_max: count += 1 # 遍歷訓練數據集,不斷更新權值 for i in range(m): diff = np.dot(theta, input_data[i]) - target_data[i] # 訓練集代入,計算誤差值 # 采用隨機梯度下降算法,更新一次權值只使用一組訓練數據 theta = theta - alpha * diff * input_data[i] # ------------------------------終止條件判斷----------------------------------------- # 若沒終止,則繼續讀取樣本進行處理,如果所有樣本都讀取完畢了,則循環重新從頭開始讀取樣本進行處理。 # ----------------------------------終止條件判斷----------------------------------------- # 注意:有多種迭代終止條件,和判斷語句的位置。終止判斷可以放在權值向量更新一次后,也可以放在更新m次后。 if np.linalg.norm(theta - error) < epsilon: # 終止條件:前后兩次計算出的權向量的絕對誤差充分小 finish = 1 break else: error = theta print 'loop count = %d' % count, '\tw:',theta # check with scipy linear regression slope, intercept, r_value, p_value, slope_std_error = stats.linregress(x, target_data) print 'intercept = %s slope = %s' % (intercept, slope) plt.plot(x, target_data, 'g*') plt.plot(x, theta[1] * x + theta[0], 'r') plt.show()
運行結果截圖:
Mini-batch梯度下降
#!/usr/bin/python #coding=utf-8 import numpy as np from scipy importstats import matplotlib.pyplot as plt # 構造訓練數據 x = np.arange(0.,10.,0.2) m = len(x) # 訓練數據點數目 print m x0 = np.full(m, 1.0) input_data = np.vstack([x0, x]).T # 將偏置b作為權向量的第一個分量 target_data = 2 *x + 5 +np.random.randn(m) # 兩種終止條件 loop_max = 10000 #最大迭代次數(防止死循環) epsilon = 1e-3 # 初始化權值 np.random.seed(0) theta = np.random.randn(2) alpha = 0.001 #步長(注意取值過大會導致振蕩即不收斂,過小收斂速度變慢) diff = 0. error = np.zeros(2) count = 0 #循環次數 finish = 0 #終止標志 minibatch_size = 5 #每次更新的樣本數 while count < loop_max: count += 1 # minibatch梯度下降是在權值更新前對所有樣例匯總誤差,而隨機梯度下降的權值是通過考查某個訓練樣例來更新的 # 在minibatch梯度下降中,權值更新的每一步對多個樣例求和,需要更多的計算 for i inrange(1,m,minibatch_size): sum_m = np.zeros(2) for k inrange(i-1,i+minibatch_size-1,1): dif = (np.dot(theta, input_data[k]) - target_data[k]) *input_data[k] sum_m = sum_m + dif #當alpha取值過大時,sum_m會在迭代過程中會溢出 theta = theta- alpha * (1.0/minibatch_size) * sum_m #注意步長alpha的取值,過大會導致振蕩 # 判斷是否已收斂 if np.linalg.norm(theta- error) < epsilon: finish = 1 break else: error = theta print 'loopcount = %d'% count, '\tw:',theta print 'loop count = %d'% count, '\tw:',theta # check with scipy linear regression slope, intercept, r_value, p_value,slope_std_error = stats.linregress(x, target_data) print 'intercept = %s slope = %s'% (intercept, slope) plt.plot(x, target_data, 'g*') plt.plot(x, theta[1]* x +theta[0],'r') plt.show()
運行結果:

關于“python怎么實現梯度下降算法”這篇文章就分享到這里了,希望以上內容可以對大家有一定的幫助,使各位可以學到更多知識,如果覺得文章不錯,請把它分享出去讓更多的人看到。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





