溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇文章主要介紹“YOLOv5目標檢測之anchor設定的方法”的相關知識,小編通過實際案例向大家展示操作過程,操作方法簡單快捷,實用性強,希望這篇“YOLOv5目標檢測之anchor設定的方法”文章能幫助大家解決問題。
yolo算法作為one-stage領域的佼佼者,采用anchor-based的方法進行目標檢測,使用不同尺度的anchor直接回歸目標框并一次性輸出目標框的位置和類別置信度。
為什么使用anchor進行檢測?
最初的YOLOv1的初始訓練過程很不穩定,在YOLOv2的設計過程中,作者觀察了大量圖片的ground truth,發現相同類別的目標實例具有相似的gt長寬比:比如車,gt都是矮胖的長方形;比如行人,gt都是瘦高的長方形。所以作者受此啟發,從數據集中預先準備幾個幾率比較大的bounding box,再以它們為基準進行預測。
首先,yolov5中使用的coco數據集輸入圖片的尺寸為640x640,但是訓練過程的輸入尺寸并不唯一,因為v5可以采用masaic增強技術把4張圖片的部分組成了一張尺寸一定的輸入圖片。但是如果需要使用預訓練權重,最好將輸入圖片尺寸調整到與作者相同的尺寸,而且輸入圖片尺寸必須是32的倍數,這與下面anchor檢測的階段有關。
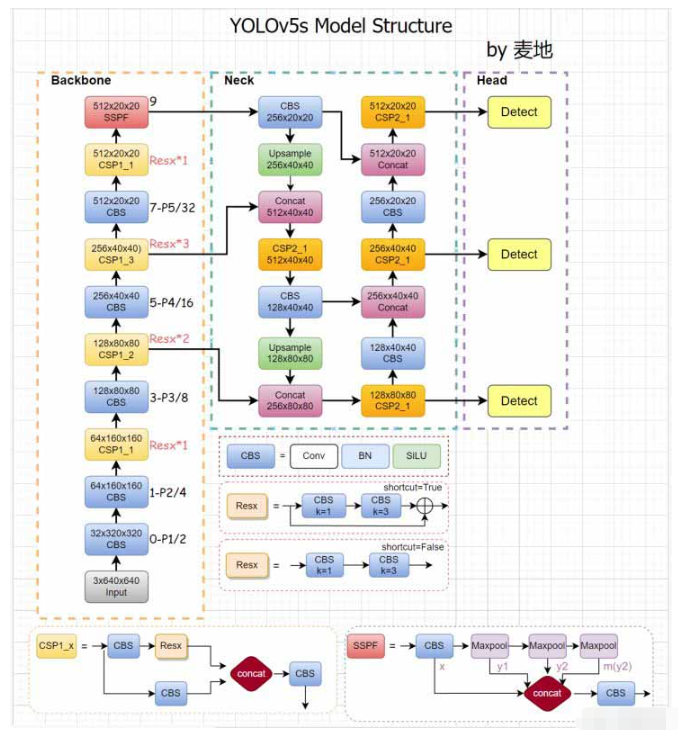
上圖是我自己繪制的v5 v6.0的網絡結構圖。當我們的輸入尺寸為640*640時,會得到3個不同尺度的輸出:80x80(640/8)、40x40(640/16)、20x20(640/32),即上圖中的CSP2_3模塊的輸出。
anchors: - [10,13, 16,30, 33,23] # P3/8 - [30,61, 62,45, 59,119] # P4/16 - [116,90, 156,198, 373,326] # P5/32
其中,80x80代表淺層的特征圖(P3),包含較多的低層級信息,適合用于檢測小目標,所以這一特征圖所用的anchor尺度較小;同理,20x20代表深層的特征圖(P5),包含更多高層級的信息,如輪廓、結構等信息,適合用于大目標的檢測,所以這一特征圖所用的anchor尺度較大。另外的40x40特征圖(P4)上就用介于這兩個尺度之間的anchor用來檢測中等大小的目標。yolov5之所以能高效快速地檢測跨尺度目標,這種對不同特征圖使用不同尺度的anchor的思想功不可沒。
以上就是yolov5中的anchors的具體解釋。
對于大部分圖片而言,由于其尺寸與我們預設的輸入尺寸不符,所以在輸入階段就做了resize,導致預先標注的bounding box大小也發生變化。而anchor是根據我們輸入網絡中的bounding box大小計算得到的,所以在這個resize過程中就存在anchor重新聚類的過程。在yolov5/utils/autoanchor.py文件下,有一個函數kmeans_anchor,通過kmeans的方法計算得到anchor。具體如下:
def kmean_anchors(dataset='./data/coco128.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
""" Creates kmeans-evolved anchors from training dataset
Arguments:
dataset: path to data.yaml, or a loaded dataset
n: number of anchors
img_size: image size used for training
thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
gen: generations to evolve anchors using genetic algorithm
verbose: print all results
Return:
k: kmeans evolved anchors
Usage:
from utils.autoanchor import *; _ = kmean_anchors()
"""
from scipy.cluster.vq import kmeans
thr = 1. / thr
prefix = colorstr('autoanchor: ')
def metric(k, wh): # compute metrics
r = wh[:, None] / k[None]
x = torch.min(r, 1. / r).min(2)[0] # ratio metric
# x = wh_iou(wh, torch.tensor(k)) # iou metric
return x, x.max(1)[0] # x, best_x
def anchor_fitness(k): # mutation fitness
_, best = metric(torch.tensor(k, dtype=torch.float32), wh)
return (best * (best > thr).float()).mean() # fitness
def print_results(k):
k = k[np.argsort(k.prod(1))] # sort small to large
x, best = metric(k, wh0)
bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
print(f'{prefix}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr')
print(f'{prefix}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, '
f'past_thr={x[x > thr].mean():.3f}-mean: ', end='')
for i, x in enumerate(k):
print('%i,%i' % (round(x[0]), round(x[1])), end=', ' if i < len(k) - 1 else '\n') # use in *.cfg
return k
if isinstance(dataset, str): # *.yaml file
with open(dataset, errors='ignore') as f:
data_dict = yaml.safe_load(f) # model dict
from datasets import LoadImagesAndLabels
dataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)
# Get label wh
shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
# Filter
i = (wh0 < 3.0).any(1).sum()
if i:
print(f'{prefix}WARNING: Extremely small objects found. {i} of {len(wh0)} labels are < 3 pixels in size.')
wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
# wh = wh * (np.random.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
# Kmeans calculation
print(f'{prefix}Running kmeans for {n} anchors on {len(wh)} points...')
s = wh.std(0) # sigmas for whitening
k, dist = kmeans(wh / s, n, iter=30) # points, mean distance
assert len(k) == n, f'{prefix}ERROR: scipy.cluster.vq.kmeans requested {n} points but returned only {len(k)}'
k *= s
wh = torch.tensor(wh, dtype=torch.float32) # filtered
wh0 = torch.tensor(wh0, dtype=torch.float32) # unfiltered
k = print_results(k)
# Plot
# k, d = [None] * 20, [None] * 20
# for i in tqdm(range(1, 21)):
# k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
# fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)
# ax = ax.ravel()
# ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
# fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
# ax[0].hist(wh[wh[:, 0]<100, 0],400)
# ax[1].hist(wh[wh[:, 1]<100, 1],400)
# fig.savefig('wh.png', dpi=200)
# Evolve
npr = np.random
f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
pbar = tqdm(range(gen), desc=f'{prefix}Evolving anchors with Genetic Algorithm:') # progress bar
for _ in pbar:
v = np.ones(sh)
while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
v = ((npr.random(sh) < mp) * random.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
kg = (k.copy() * v).clip(min=2.0)
fg = anchor_fitness(kg)
if fg > f:
f, k = fg, kg.copy()
pbar.desc = f'{prefix}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'
if verbose:
print_results(k)
return print_results(k)代碼的注釋部分其實已經對參數及調用方法解釋的很清楚了,這里我只簡單說一下:
Arguments: dataset: 數據的yaml路徑 n: 類簇的個數 img_size: 訓練過程中的圖片尺寸(32的倍數) thr: anchor的長寬比閾值,將長寬比限制在此閾值之內 gen: k-means算法最大迭代次數(不理解的可以去看k-means算法) verbose: 打印參數 Usage: from utils.autoanchor import *; _ = kmean_anchors()
關于“YOLOv5目標檢測之anchor設定的方法”的內容就介紹到這里了,感謝大家的閱讀。如果想了解更多行業相關的知識,可以關注億速云行業資訊頻道,小編每天都會為大家更新不同的知識點。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





