溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
本篇內容主要講解“什么是Python蟻群算法”,感興趣的朋友不妨來看看。本文介紹的方法操作簡單快捷,實用性強。下面就讓小編來帶大家學習“什么是Python蟻群算法”吧!
蟻群算法簡介
TSP問題描述
蟻群算法原理
代碼實現
蟻群算法(Ant Clony Optimization, ACO)是一種群智能算法,它是由一群無智能或有輕微智能的個體(Agent)通過相互協作而表現出智能行為,從而為求解復雜問題提供了一個新的可能性。蟻群算法最早是由意大利學者Colorni A., Dorigo M. 等于1991年提出。經過20多年的發展,蟻群算法在理論以及應用研究上已經得到巨大的進步。
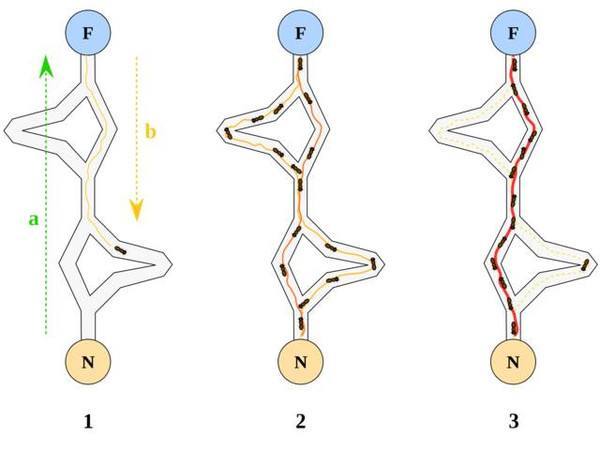
蟻群算法是一種仿生學算法,是由自然界中螞蟻覓食的行為而啟發的。在自然界中,螞蟻覓食過程中,蟻群總能夠按照尋找到一條從蟻巢和食物源的最優路徑。下圖顯示了這樣一個覓食的過程。
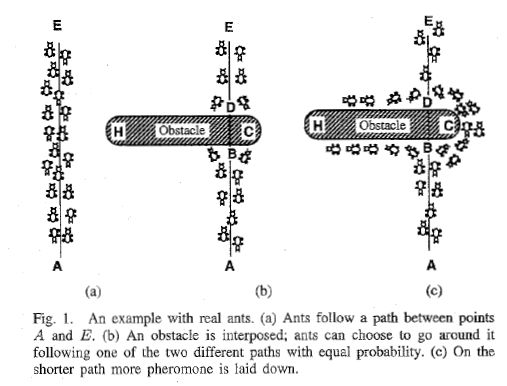
在圖(a)中,有一群螞蟻,假如A是蟻巢,E是食物源(反之亦然)。這群螞蟻將沿著蟻巢和食物源之間的直線路徑行駛。假如在A和E之間突然出現了一個障礙物(圖(b)),那么,在B點(或D點)的螞蟻將要做出決策,到底是向左行駛還是向右行駛?由于一開始路上沒有前面螞蟻留下的 信息素(pheromone) ,螞蟻朝著兩個方向行進的概率是相等的。但是當有螞蟻走過時,它將會在它行進的路上釋放出信息素,并且這種信息素會議一定的速率散發掉。信息素是螞蟻之間交流的工具之一。它后面的螞蟻通過路上信息素的濃度,做出決策,往左還是往右。很明顯,沿著短邊的的路徑上信息素將會越來越濃(圖(c)),從而吸引了越來越多的螞蟻沿著這條路徑行駛。
蟻群算法最早用來求解TSP問題,并且表現出了很大的優越性,因為它分布式特性,魯棒性強并且容易與其它算法結合,但是同時也存在這收斂速度慢,容易陷入局部最優(local optimal)等缺點。
TSP問題(Travel Salesperson Problem,即旅行商問題或者稱為中國郵遞員問題),是一種NP-hard問題,此類問題用一般的算法是很難得到最優解的,所以一般需要借助一些啟發式算法求解,例如遺傳算法(GA),蟻群算法(ACO),微粒群算法(PSO)等等。
TSP問題(旅行商問題)是指旅行家要旅行n個城市,要求各個城市經歷且僅經歷一次 然后回到出發城市,并要求所走的路程最短。
一個TSP問題可以表達為:求解遍歷圖G=(V,E,C),所有的節點一次并且回到起始節點,使得連接這些節點的路徑成本最低。
假如蟻群中所有螞蟻的數量為m,所有城市之間的信息素用矩陣pheromone表示,最短路徑為bestLength,最佳路徑為bestTour。每只螞蟻都有自己的內存,內存中用一個禁忌表(Tabu)來存儲該螞蟻已經訪問過的城市,表示其在以后的搜索中將不能訪問這些城市;還有用另外一個允許訪問的城市表(Allowed)來存儲它還可以訪問的城市;另外還用一個矩陣(Delta)來存儲它在一個循環(或者迭代)中給所經過的路徑釋放的信息素;還有另外一些數據,例如一些控制參數(α,β,ρ,Q),該螞蟻行走玩全程的總成本或距離(tourLength),等等。假定算法總共運行MAX_GEN次,運行時間為t。
蟻群算法計算過程如下:
(1)初始化。
(2)為每只螞蟻選擇下一個節點。
(3)更新信息素矩陣。
(4)檢查終止條件
如果達到最大代數MAX_GEN,算法終止,轉到第(5)步;否則,重新初始化所有的螞蟻的Delt矩陣所有元素初始化為0,Tabu表清空,Allowed表中加入所有的城市節點。隨機選擇它們的起始位置(也可以人工指定)。在Tabu中加入起始節點,Allowed中去掉該起始節點,重復執行(2),(3),(4)步。
(5)輸出最優值
# -*- coding: utf-8 -*-
import random
import copy
import time
import sys
import math
import tkinter #//GUI模塊
import threading
from functools import reduce
# 參數
'''
ALPHA:信息啟發因子,值越大,則螞蟻選擇之前走過的路徑可能性就越大
,值越小,則蟻群搜索范圍就會減少,容易陷入局部最優
BETA:Beta值越大,蟻群越就容易選擇局部較短路徑,這時算法收斂速度會
加快,但是隨機性不高,容易得到局部的相對最優
'''
(ALPHA, BETA, RHO, Q) = (1.0,2.0,0.5,100.0)
# 城市數,蟻群
(city_num, ant_num) = (50,50)
distance_x = [
178,272,176,171,650,499,267,703,408,437,491,74,532,
416,626,42,271,359,163,508,229,576,147,560,35,714,
757,517,64,314,675,690,391,628,87,240,705,699,258,
428,614,36,360,482,666,597,209,201,492,294]
distance_y = [
170,395,198,151,242,556,57,401,305,421,267,105,525,
381,244,330,395,169,141,380,153,442,528,329,232,48,
498,265,343,120,165,50,433,63,491,275,348,222,288,
490,213,524,244,114,104,552,70,425,227,331]
#城市距離和信息素
distance_graph = [ [0.0 for col in range(city_num)] for raw in range(city_num)]
pheromone_graph = [ [1.0 for col in range(city_num)] for raw in range(city_num)]
#----------- 螞蟻 -----------
class Ant(object):
# 初始化
def __init__(self,ID):
self.ID = ID # ID
self.__clean_data() # 隨機初始化出生點
# 初始數據
def __clean_data(self):
self.path = [] # 當前螞蟻的路徑
self.total_distance = 0.0 # 當前路徑的總距離
self.move_count = 0 # 移動次數
self.current_city = -1 # 當前停留的城市
self.open_table_city = [True for i in range(city_num)] # 探索城市的狀態
city_index = random.randint(0,city_num-1) # 隨機初始出生點
self.current_city = city_index
self.path.append(city_index)
self.open_table_city[city_index] = False
self.move_count = 1
# 選擇下一個城市
def __choice_next_city(self):
next_city = -1
select_citys_prob = [0.0 for i in range(city_num)] #存儲去下個城市的概率
total_prob = 0.0
# 獲取去下一個城市的概率
for i in range(city_num):
if self.open_table_city[i]:
try :
# 計算概率:與信息素濃度成正比,與距離成反比
select_citys_prob[i] = pow(pheromone_graph[self.current_city][i], ALPHA) * pow((1.0/distance_graph[self.current_city][i]), BETA)
total_prob += select_citys_prob[i]
except ZeroDivisionError as e:
print ('Ant ID: {ID}, current city: {current}, target city: {target}'.format(ID = self.ID, current = self.current_city, target = i))
sys.exit(1)
# 輪盤選擇城市
if total_prob > 0.0:
# 產生一個隨機概率,0.0-total_prob
temp_prob = random.uniform(0.0, total_prob)
for i in range(city_num):
if self.open_table_city[i]:
# 輪次相減
temp_prob -= select_citys_prob[i]
if temp_prob < 0.0:
next_city = i
break
# 未從概率產生,順序選擇一個未訪問城市
# if next_city == -1:
# for i in range(city_num):
# if self.open_table_city[i]:
# next_city = i
# break
if (next_city == -1):
next_city = random.randint(0, city_num - 1)
while ((self.open_table_city[next_city]) == False): # if==False,說明已經遍歷過了
next_city = random.randint(0, city_num - 1)
# 返回下一個城市序號
return next_city
# 計算路徑總距離
def __cal_total_distance(self):
temp_distance = 0.0
for i in range(1, city_num):
start, end = self.path[i], self.path[i-1]
temp_distance += distance_graph[start][end]
# 回路
end = self.path[0]
temp_distance += distance_graph[start][end]
self.total_distance = temp_distance
# 移動操作
def __move(self, next_city):
self.path.append(next_city)
self.open_table_city[next_city] = False
self.total_distance += distance_graph[self.current_city][next_city]
self.current_city = next_city
self.move_count += 1
# 搜索路徑
def search_path(self):
# 初始化數據
self.__clean_data()
# 搜素路徑,遍歷完所有城市為止
while self.move_count < city_num:
# 移動到下一個城市
next_city = self.__choice_next_city()
self.__move(next_city)
# 計算路徑總長度
self.__cal_total_distance()
#----------- TSP問題 -----------
class TSP(object):
def __init__(self, root, width = 800, height = 600, n = city_num):
# 創建畫布
self.root = root
self.width = width
self.height = height
# 城市數目初始化為city_num
self.n = n
# tkinter.Canvas
self.canvas = tkinter.Canvas(
root,
width = self.width,
height = self.height,
bg = "#EBEBEB", # 背景白色
xscrollincrement = 1,
yscrollincrement = 1
)
self.canvas.pack(expand = tkinter.YES, fill = tkinter.BOTH)
self.title("TSP蟻群算法(n:初始化 e:開始搜索 s:停止搜索 q:退出程序)")
self.__r = 5
self.__lock = threading.RLock() # 線程鎖
self.__bindEvents()
self.new()
# 計算城市之間的距離
for i in range(city_num):
for j in range(city_num):
temp_distance = pow((distance_x[i] - distance_x[j]), 2) + pow((distance_y[i] - distance_y[j]), 2)
temp_distance = pow(temp_distance, 0.5)
distance_graph[i][j] =float(int(temp_distance + 0.5))
# 按鍵響應程序
def __bindEvents(self):
self.root.bind("q", self.quite) # 退出程序
self.root.bind("n", self.new) # 初始化
self.root.bind("e", self.search_path) # 開始搜索
self.root.bind("s", self.stop) # 停止搜索
# 更改標題
def title(self, s):
self.root.title(s)
# 初始化
def new(self, evt = None):
# 停止線程
self.__lock.acquire()
self.__running = False
self.__lock.release()
self.clear() # 清除信息
self.nodes = [] # 節點坐標
self.nodes2 = [] # 節點對象
# 初始化城市節點
for i in range(len(distance_x)):
# 在畫布上隨機初始坐標
x = distance_x[i]
y = distance_y[i]
self.nodes.append((x, y))
# 生成節點橢圓,半徑為self.__r
node = self.canvas.create_oval(x - self.__r,
y - self.__r, x + self.__r, y + self.__r,
fill = "#ff0000", # 填充紅色
outline = "#000000", # 輪廓白色
tags = "node",
)
self.nodes2.append(node)
# 顯示坐標
self.canvas.create_text(x,y-10, # 使用create_text方法在坐標(302,77)處繪制文字
text = '('+str(x)+','+str(y)+')', # 所繪制文字的內容
fill = 'black' # 所繪制文字的顏色為灰色
)
# 順序連接城市
#self.line(range(city_num))
# 初始城市之間的距離和信息素
for i in range(city_num):
for j in range(city_num):
pheromone_graph[i][j] = 1.0
self.ants = [Ant(ID) for ID in range(ant_num)] # 初始蟻群
self.best_ant = Ant(-1) # 初始最優解
self.best_ant.total_distance = 1 << 31 # 初始最大距離
self.iter = 1 # 初始化迭代次數
# 將節點按order順序連線
def line(self, order):
# 刪除原線
self.canvas.delete("line")
def line2(i1, i2):
p1, p2 = self.nodes[i1], self.nodes[i2]
self.canvas.create_line(p1, p2, fill = "#000000", tags = "line")
return i2
# order[-1]為初始值
reduce(line2, order, order[-1])
# 清除畫布
def clear(self):
for item in self.canvas.find_all():
self.canvas.delete(item)
# 退出程序
def quite(self, evt):
self.__lock.acquire()
self.__running = False
self.__lock.release()
self.root.destroy()
print (u"\n程序已退出...")
sys.exit()
# 停止搜索
def stop(self, evt):
self.__lock.acquire()
self.__running = False
self.__lock.release()
# 開始搜索
def search_path(self, evt = None):
# 開啟線程
self.__lock.acquire()
self.__running = True
self.__lock.release()
while self.__running:
# 遍歷每一只螞蟻
for ant in self.ants:
# 搜索一條路徑
ant.search_path()
# 與當前最優螞蟻比較
if ant.total_distance < self.best_ant.total_distance:
# 更新最優解
self.best_ant = copy.deepcopy(ant)
# 更新信息素
self.__update_pheromone_gragh()
print (u"迭代次數:",self.iter,u"最佳路徑總距離:",int(self.best_ant.total_distance))
# 連線
self.line(self.best_ant.path)
# 設置標題
self.title("TSP蟻群算法(n:隨機初始 e:開始搜索 s:停止搜索 q:退出程序) 迭代次數: %d" % self.iter)
# 更新畫布
self.canvas.update()
self.iter += 1
# 更新信息素
def __update_pheromone_gragh(self):
# 獲取每只螞蟻在其路徑上留下的信息素
temp_pheromone = [[0.0 for col in range(city_num)] for raw in range(city_num)]
for ant in self.ants:
for i in range(1,city_num):
start, end = ant.path[i-1], ant.path[i]
# 在路徑上的每兩個相鄰城市間留下信息素,與路徑總距離反比
temp_pheromone[start][end] += Q / ant.total_distance
temp_pheromone[end][start] = temp_pheromone[start][end]
# 更新所有城市之間的信息素,舊信息素衰減加上新迭代信息素
for i in range(city_num):
for j in range(city_num):
pheromone_graph[i][j] = pheromone_graph[i][j] * RHO + temp_pheromone[i][j]
# 主循環
def mainloop(self):
self.root.mainloop()
#----------- 程序的入口處 -----------
if __name__ == '__main__':
TSP(tkinter.Tk()).mainloop()到此,相信大家對“什么是Python蟻群算法”有了更深的了解,不妨來實際操作一番吧!這里是億速云網站,更多相關內容可以進入相關頻道進行查詢,關注我們,繼續學習!
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





