溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇文章主要介紹“python OpenCV怎么實現答題卡識別判卷”,在日常操作中,相信很多人在python OpenCV怎么實現答題卡識別判卷問題上存在疑惑,小編查閱了各式資料,整理出簡單好用的操作方法,希望對大家解答”python OpenCV怎么實現答題卡識別判卷”的疑惑有所幫助!接下來,請跟著小編一起來學習吧!
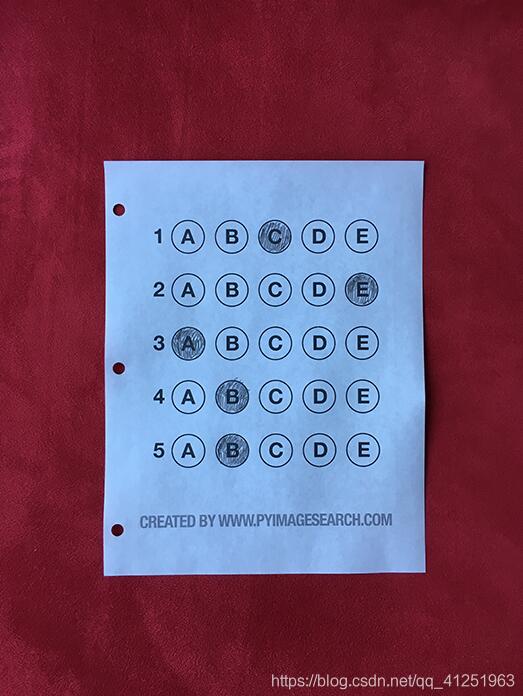
本文實例為大家分享了python OpenCV實現答題卡識別判卷的具體代碼,供大家參考,具體內容如下
完整代碼:
#導入工具包
import numpy as np
import argparse
import imutils
import cv2
# 設置參數
ap = argparse.ArgumentParser()
ap.add_argument("-i", "--image", default="./images/test_03.png",
help="path to the input image")
args = vars(ap.parse_args())
# 正確答案
ANSWER_KEY = {0: 1, 1: 4, 2: 0, 3: 3, 4: 1}
def order_points(pts):
# 一共4個坐標點
rect = np.zeros((4, 2), dtype = "float32")
# 按順序找到對應坐標0123分別是 左上,右上,右下,左下
# 計算左上,右下
s = pts.sum(axis = 1)
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
# 計算右上和左下
diff = np.diff(pts, axis = 1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
return rect
def four_point_transform(image, pts):
# 獲取輸入坐標點
rect = order_points(pts)
(tl, tr, br, bl) = rect
# 計算輸入的w和h值
widthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))
widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))
maxWidth = max(int(widthA), int(widthB))
heightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))
heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))
maxHeight = max(int(heightA), int(heightB))
# 變換后對應坐標位置
dst = np.array([
[0, 0],
[maxWidth - 1, 0],
[maxWidth - 1, maxHeight - 1],
[0, maxHeight - 1]], dtype = "float32")
# 計算變換矩陣
M = cv2.getPerspectiveTransform(rect, dst)
warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))
# 返回變換后結果
return warped
def sort_contours(cnts, method="left-to-right"):
reverse = False
i = 0
if method == "right-to-left" or method == "bottom-to-top":
reverse = True
if method == "top-to-bottom" or method == "bottom-to-top":
i = 1
boundingBoxes = [cv2.boundingRect(c) for c in cnts]
(cnts, boundingBoxes) = zip(*sorted(zip(cnts, boundingBoxes),
key=lambda b: b[1][i], reverse=reverse))
return cnts, boundingBoxes
def cv_show(name,img):
cv2.imshow(name, img)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 預處理
image = cv2.imread(args["image"])
contours_img = image.copy()
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
cv_show('blurred',blurred)
edged = cv2.Canny(blurred, 75, 200)
cv_show('edged',edged)
# 輪廓檢測
cnts = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)[0]
cv2.drawContours(contours_img,cnts,-1,(0,0,255),3)
cv_show('contours_img',contours_img)
docCnt = None
# 確保檢測到了
if len(cnts) > 0:
# 根據輪廓大小進行排序
cnts = sorted(cnts, key=cv2.contourArea, reverse=True)
# 遍歷每一個輪廓
for c in cnts:
# 近似
peri = cv2.arcLength(c, True)
approx = cv2.approxPolyDP(c, 0.02 * peri, True)
# 準備做透視變換
if len(approx) == 4:
docCnt = approx
break
# 執行透視變換
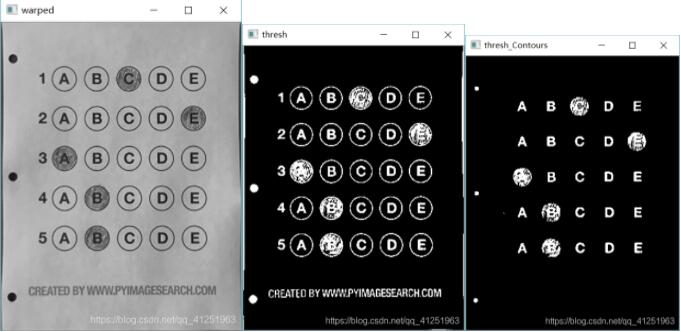
warped = four_point_transform(gray, docCnt.reshape(4, 2))
cv_show('warped',warped)
# Otsu's 閾值處理
thresh = cv2.threshold(warped, 0, 255,
cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1]
cv_show('thresh',thresh)
thresh_Contours = thresh.copy()
# 找到每一個圓圈輪廓
cnts = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)[0]
cv2.drawContours(thresh_Contours,cnts,-1,(0,0,255),3)
cv_show('thresh_Contours',thresh_Contours)
questionCnts = []
# 遍歷
for c in cnts:
# 計算比例和大小
(x, y, w, h) = cv2.boundingRect(c)
ar = w / float(h)
# 根據實際情況指定標準
if w >= 20 and h >= 20 and ar >= 0.9 and ar <= 1.1:
questionCnts.append(c)
# 按照從上到下進行排序
questionCnts = sort_contours(questionCnts,
method="top-to-bottom")[0]
correct = 0
# 每排有5個選項
for (q, i) in enumerate(np.arange(0, len(questionCnts), 5)):
# 排序
cnts = sort_contours(questionCnts[i:i + 5])[0]
bubbled = None
# 遍歷每一個結果
for (j, c) in enumerate(cnts):
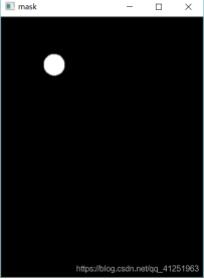
# 使用mask來判斷結果
mask = np.zeros(thresh.shape, dtype="uint8")
cv2.drawContours(mask, [c], -1, 255, -1) #-1表示填充
cv_show('mask',mask)
# 通過計算非零點數量來算是否選擇這個答案
mask = cv2.bitwise_and(thresh, thresh, mask=mask)
total = cv2.countNonZero(mask)
# 通過閾值判斷
if bubbled is None or total > bubbled[0]:
bubbled = (total, j)
# 對比正確答案
color = (0, 0, 255)
k = ANSWER_KEY[q]
# 判斷正確
if k == bubbled[1]:
color = (0, 255, 0)
correct += 1
# 繪圖
cv2.drawContours(warped, [cnts[k]], -1, color, 3)
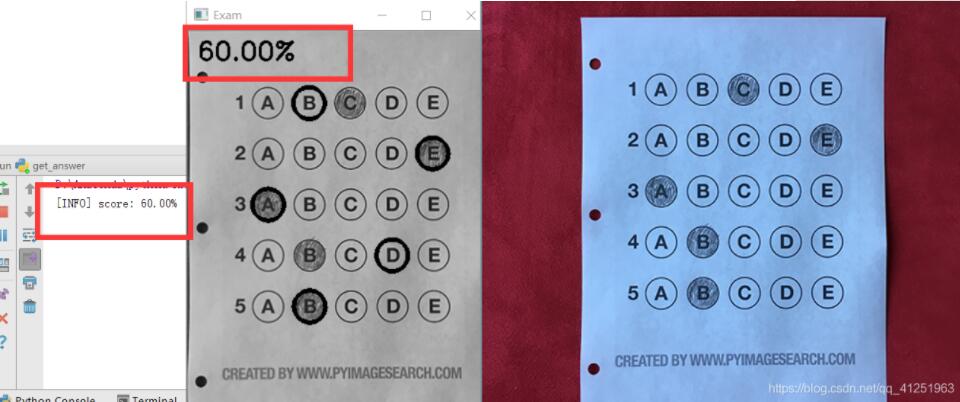
score = (correct / 5.0) * 100
print("[INFO] score: {:.2f}%".format(score))
cv2.putText(warped, "{:.2f}%".format(score), (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 2)
cv2.imshow("Original", image)
cv2.imshow("Exam", warped)
cv2.waitKey(0)
test_03.png
運行效果:
到此,關于“python OpenCV怎么實現答題卡識別判卷”的學習就結束了,希望能夠解決大家的疑惑。理論與實踐的搭配能更好的幫助大家學習,快去試試吧!若想繼續學習更多相關知識,請繼續關注億速云網站,小編會繼續努力為大家帶來更多實用的文章!
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





