溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
本文小編為大家詳細介紹“Python怎么實現炫彩跑馬燈”,內容詳細,步驟清晰,細節處理妥當,希望這篇“Python怎么實現炫彩跑馬燈”文章能幫助大家解決疑惑,下面跟著小編的思路慢慢深入,一起來學習新知識吧。
一、實驗目的
了解ws2812b的工作原理
學習ws2812b的驅動方法
二、實驗器材
TPYBoard v102 1塊
ws2812b RGB-Ring-8 1個
micro USB數據線 1條
杜邦線 若干
三、WS2812B的介紹
WS2812B是一個集控制電路與發光電路于一體的智能外控LED光源。 其外型與一個5050LED燈珠相同, 每個元件即為一個像素點。像素點內部包含了智能數字接口數據鎖存信號整形放大驅動電路, 還包含有高精度的內部振蕩器和可編程定電流控制部分, 有效保證了像素點光的顏色高度一致。
數據協議采用單線歸零碼的通訊方式, 像素點在上電復位以后, DIN端接受從控制器傳輸過來的數據, 首先送過來的24bit數據被第一個像素點提取后, 送到像素點內部的數據鎖存器, 剩余的數據經過內部整形處理電路整形放大后通過DO端口開始轉發輸出給下一個級聯的像素點, 每經過一個像素點的傳輸, 信號減少24bit。像素點采用自動整形轉發技術, 使得該像素點的級聯個數不受信號傳送的限制, 僅僅受限信號傳輸速度要求。
實物圖

上圖是8個燈珠的。
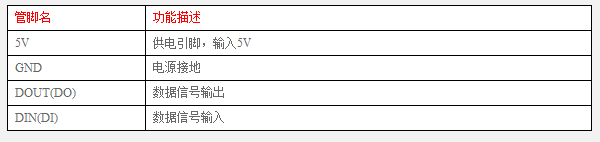
WS2812B的引腳說明:
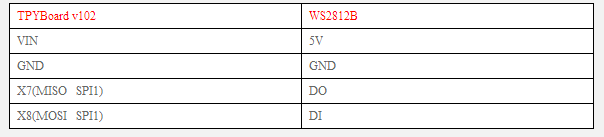
硬件連接
將TPYBoard v102與WS2812B的接線示意圖,如下:
程序源碼如下:
import pyb import math from ws2812 import WS2812 ring = WS2812(spi_bus=1, led_count=8, intensity=0.1) def data_generator(led_count): data = [(0, 0, 0) for i in range(led_count)] step = 0 while True: red = int((1 + math.sin(step * 0.1324)) * 127) green = int((1 + math.sin(step * 0.1654)) * 127) blue = int((1 + math.sin(step * 0.1)) * 127) data[step % led_count] = (red, green, blue) yield data step += 1 for data in data_generator(ring.led_count): ring.show(data) pyb.delay(100)
里面還需要引入一個ws2812.py 文件。內容如下:
import gc import pyb class WS2812: """ Driver for WS2812 RGB LEDs. May be used for controlling single LED or chain of LEDs. Example of use: chain = WS2812(spi_bus=1, led_count=4) data = [ (255, 0, 0), # red (0, 255, 0), # green (0, 0, 255), # blue (85, 85, 85), # white ] chain.show(data) Version: 1.0 """ buf_bytes = (0x11, 0x13, 0x31, 0x33) def __init__(self, spi_bus=1, led_count=1, intensity=1): """ Params: * spi_bus = SPI bus ID (1 or 2) * led_count = count of LEDs * intensity = light intensity (float up to 1) """ self.led_count = led_count self.intensity = intensity # prepare SPI data buffer (4 bytes for each color) self.buf_length = self.led_count * 3 * 4 self.buf = bytearray(self.buf_length) # SPI init self.spi = pyb.SPI(spi_bus, pyb.SPI.MASTER, baudrate=3200000, polarity=0, phase=1) # turn LEDs off self.show([]) def show(self, data): """ Show RGB data on LEDs. Expected data = [(R, G, B), ...] where R, G and B are intensities of colors in range from 0 to 255. One RGB tuple for each LED. Count of tuples may be less than count of connected LEDs. """ self.fill_buf(data) self.send_buf() def send_buf(self): """ Send buffer over SPI. """ self.spi.send(self.buf) gc.collect() def update_buf(self, data, start=0): """ Fill a part of the buffer with RGB data. Order of colors in buffer is changed from RGB to GRB because WS2812 LED has GRB order of colors. Each color is represented by 4 bytes in buffer (1 byte for each 2 bits). Returns the index of the first unfilled LED Note: If you find this function ugly, it's because speed optimisations beated purity of code. """ buf = self.buf buf_bytes = self.buf_bytes intensity = self.intensity mask = 0x03 index = start * 12 for red, green, blue in data: red = int(red * intensity) green = int(green * intensity) blue = int(blue * intensity) buf[index] = buf_bytes[green >> 6 & mask] buf[index+1] = buf_bytes[green >> 4 & mask] buf[index+2] = buf_bytes[green >> 2 & mask] buf[index+3] = buf_bytes[green & mask] buf[index+4] = buf_bytes[red >> 6 & mask] buf[index+5] = buf_bytes[red >> 4 & mask] buf[index+6] = buf_bytes[red >> 2 & mask] buf[index+7] = buf_bytes[red & mask] buf[index+8] = buf_bytes[blue >> 6 & mask] buf[index+9] = buf_bytes[blue >> 4 & mask] buf[index+10] = buf_bytes[blue >> 2 & mask] buf[index+11] = buf_bytes[blue & mask] index += 12 return index // 12 def fill_buf(self, data): """ Fill buffer with RGB data. All LEDs after the data are turned off. """ end = self.update_buf(data) # turn off the rest of the LEDs buf = self.buf off = self.buf_bytes[0] for index in range(end * 12, self.buf_length): buf[index] = off index += 1
讀到這里,這篇“Python怎么實現炫彩跑馬燈”文章已經介紹完畢,想要掌握這篇文章的知識點還需要大家自己動手實踐使用過才能領會,如果想了解更多相關內容的文章,歡迎關注億速云行業資訊頻道。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





