溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
在K8s中將Pod調度到某一臺Node節點之后,后續的狀態維護信息則是由對應機器上的kubelet進行維護,如何實時反饋本地運行狀態,并通知apiserver則是設計的難點, 本節主要是通過感知Pod狀態變化和探測狀態改變兩個流程來實際分析其核心數據結構,來了解內部設計
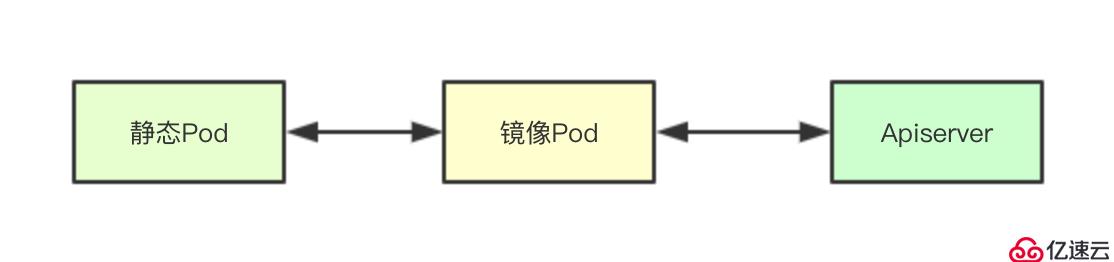
靜態Pod主要是指的那些不是通過感知apiserver創建的pod, 因為apiserver上并不包含,但是同時也需要維護和獲取這類Pod的狀態, k8s中就設計了一個鏡像Pod的概念,其實就是為靜態Pod鏡像出來一個Pod該Pod的主要信息與靜態Pod一致,并且在apiserver中進行創建,通過apiserver可以感知的這個鏡像Pod來反映真實的靜態Pod的狀態,?
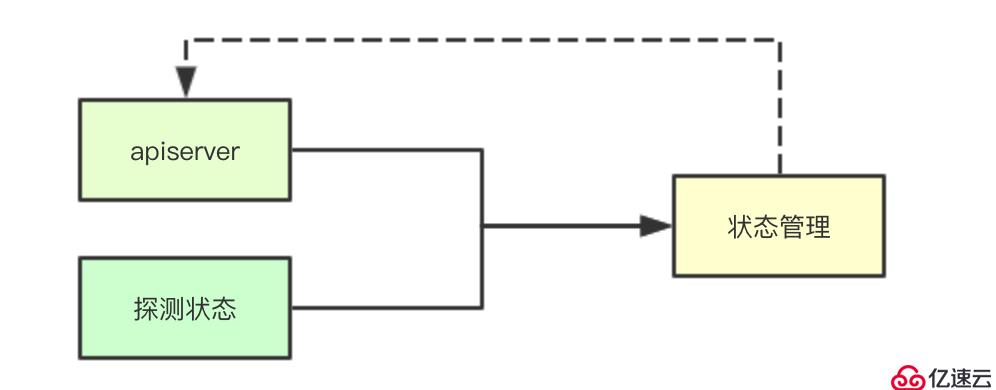
statusManager是進行狀態同步的關鍵組件其需要綜合當前Pod運行中的數據和apiserver存儲的數據,從而決定最終的狀態轉換, 這里先關注圖上畫出來的,更多的狀態等后續會一一介紹
type versionedPodStatus struct {
status v1.PodStatus
// 單調遞增的版本號(每個pod)
version uint64
// Pod name & namespace, for sending updates to API server.
podName string
podNamespace string
}在Kubelet中為保證與apiserver端信息的同步,在本地保存了一個Pod狀態版本信息,其里面除了保存當前Pod的狀態數據還有一個版本版本號,通過單調遞增的版本號的對比來確定是否進行狀態的同步
statusManager的流程其實還是蠻復雜的,今天我們就只講一個場景,即kubelet通過apiserver感知到一個Pod更新,然后順著該功能的數據流來進行梳理statusMangaer里面的數據流轉
manager中的核心狀態相關的數據結構可以主要分為兩大類:映射數據維護(podManager、podStatuses、apiStatusVersions)數據通信管道(podStatusChannel), 剩余的則是對與apiserver通信的kublet和進行pod刪除檢查的?podDeletionSafety
type manager struct {
kubeClient clientset.Interface
// 管理緩存Pod,包含鏡像pod和靜態pod的映射
podManager kubepod.Manager
// 從pod UID映射到相應pod的版本狀態信息 。
podStatuses map[types.UID]versionedPodStatus
podStatusesLock sync.RWMutex
podStatusChannel chan podStatusSyncRequest
// 存儲鏡像pod的版本
apiStatusVersions map[kubetypes.MirrorPodUID]uint64
podDeletionSafety PodDeletionSafetyProvider
}設置Pod狀態主要是位于kubelet中的syncPod中,在接收到pod事件變更之后,會與apiserver進行 Pod最新數據的同步從而獲取當前pod在apiserver端的最新狀態
func (m *manager) SetPodStatus(pod *v1.Pod, status v1.PodStatus) {
m.podStatusesLock.Lock()
defer m.podStatusesLock.Unlock()
for _, c := range pod.Status.Conditions {
if !kubetypes.PodConditionByKubelet(c.Type) {
klog.Errorf("Kubelet is trying to update pod condition %q for pod %q. "+
"But it is not owned by kubelet.", string(c.Type), format.Pod(pod))
}
}
// Make sure we're caching a deep copy.
status = *status.DeepCopy()
// 如果Pod被刪除了則需要強制與apiserver進行信息的同步
m.updateStatusInternal(pod, status, pod.DeletionTimestamp != nil)
}
var oldStatus v1.PodStatus
// 檢測之前的本地緩存數據
cachedStatus, isCached := m.podStatuses[pod.UID]
if isCached {
oldStatus = cachedStatus.status
} else if mirrorPod, ok := m.podManager.GetMirrorPodByPod(pod); ok {
oldStatus = mirrorPod.Status
} else {
oldStatus = pod.Status
}檢測容器狀態主要是針對容器終止狀態轉發的合法性進行檢測,其實就是根據設定的Pod的RestartPolicy來檢測針對一個終止的容器是否可以進行重啟
if err := checkContainerStateTransition(oldStatus.ContainerStatuses, status.ContainerStatuses, pod.Spec.RestartPolicy); err != nil {
klog.Errorf("Status update on pod %v/%v aborted: %v", pod.Namespace, pod.Name, err)
return false
}
if err := checkContainerStateTransition(oldStatus.InitContainerStatuses, status.InitContainerStatuses, pod.Spec.RestartPolicy); err != nil {
klog.Errorf("Status update on pod %v/%v aborted: %v", pod.Namespace, pod.Name, err)
return false
}通過最新的status里面的condition設定對應PodCondition的LastTransitionTime更新時間未當前時間
// Set ContainersReadyCondition.LastTransitionTime.
updateLastTransitionTime(&status, &oldStatus, v1.ContainersReady)
// Set ReadyCondition.LastTransitionTime.
updateLastTransitionTime(&status, &oldStatus, v1.PodReady)
// Set InitializedCondition.LastTransitionTime.
updateLastTransitionTime(&status, &oldStatus, v1.PodInitialized)
// Set PodScheduledCondition.LastTransitionTime.
updateLastTransitionTime(&status, &oldStatus, v1.PodScheduled)首先會根據當前容器的個數,從而決定每個容器最大的字節數大小,然后對容器里面的終止狀態里面的Message信息,進行截斷,同時進行時間的校對
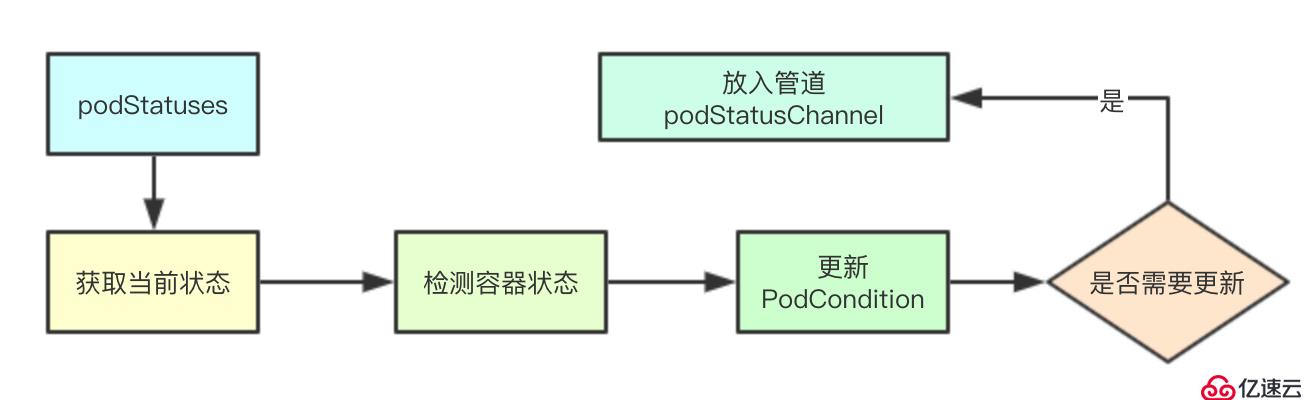
normalizeStatus(pod, &status)如果之前已經緩存了對應的數據,并且緩存的數據與當前的狀態未發生改變,也不需要強制更新,就直接返回
if isCached && isPodStatusByKubeletEqual(&cachedStatus.status, &status) && !forceUpdate {
// 如果不強制更新 ,默認是true此處不會成立
klog.V(3).Infof("Ignoring same status for pod %q, status: %+v", format.Pod(pod), status)
return false // No new status.
}生成最新的狀態緩存數據,并且遞增本地的版本信息
// 構建新的狀態
newStatus := versionedPodStatus{
status: status,
version: cachedStatus.version + 1, // 更新器緩存
podName: pod.Name,
podNamespace: pod.Namespace,
}
// 更新新的緩存狀態
m.podStatuses[pod.UID] = newStatus
select {
case m.podStatusChannel <- podStatusSyncRequest{pod.UID, newStatus}: // 構建一個新的同步請求
klog.V(5).Infof("Status Manager: adding pod: %q, with status: (%d, %v) to podStatusChannel",
pod.UID, newStatus.version, newStatus.status)
return true
default:
// Let the periodic syncBatch handle the update if the channel is full.
// We can't block, since we hold the mutex lock.
klog.V(4).Infof("Skipping the status update for pod %q for now because the channel is full; status: %+v",
format.Pod(pod), status)
return false
}
探測狀態其實就是Pod內容器的運行狀態,比如如果設置了Readiness探測,當某個容器探測失敗的時候,就會通知對應的service從后端的enpoint中移除該Pod, 讓我們一起看看Kubelet是如何將運行狀態通知到apiserver端的
func (m *manager) SetContainerReadiness(podUID types.UID, containerID kubecontainer.ContainerID, ready bool) {
m.podStatusesLock.Lock()
defer m.podStatusesLock.Unlock()
// 獲取本地的容器
pod, ok := m.podManager.GetPodByUID(podUID)
if !ok {
klog.V(4).Infof("Pod %q has been deleted, no need to update readiness", string(podUID))
return
}
// 獲取當前的狀態
oldStatus, found := m.podStatuses[pod.UID]
if !found {
klog.Warningf("Container readiness changed before pod has synced: %q - %q",
format.Pod(pod), containerID.String())
return
}
// 獲取當前的容器狀態
containerStatus, _, ok := findContainerStatus(&oldStatus.status, containerID.String())
if !ok {
klog.Warningf("Container readiness changed for unknown container: %q - %q",
format.Pod(pod), containerID.String())
return
} // 檢測前后的就緒狀態是否發生改變
if containerStatus.Ready == ready {
klog.V(4).Infof("Container readiness unchanged (%v): %q - %q", ready,
format.Pod(pod), containerID.String())
return
}獲取容器的狀態,修改就緒為當前的狀態
status := *oldStatus.status.DeepCopy()
containerStatus, _, _ = findContainerStatus(&status, containerID.String())
containerStatus.Ready = ready會根據當前運行時的容器探測的狀態,來修改對應PodCondition里面的狀態,最后調用內部的更新邏輯
updateConditionFunc := func(conditionType v1.PodConditionType, condition v1.PodCondition) {
conditionIndex := -1
// 獲取Pod對應的PodCondition狀態
for i, condition := range status.Conditions {
if condition.Type == conditionType {
conditionIndex = i
break
}
}
// 修改或追加Pod對應的PodCondition狀態
if conditionIndex != -1 {
status.Conditions[conditionIndex] = condition
} else {
klog.Warningf("PodStatus missing %s type condition: %+v", conditionType, status)
status.Conditions = append(status.Conditions, condition)
}
}
// 計算Ready狀態
updateConditionFunc(v1.PodReady, GeneratePodReadyCondition(&pod.Spec, status.Conditions, status.ContainerStatuses, status.Phase))
// 計算容器Ready狀態
updateConditionFunc(v1.ContainersReady, GenerateContainersReadyCondition(&pod.Spec, status.ContainerStatuses, status.Phase))
m.updateStatusInternal(pod, status, false)statusManager會啟動一個后臺的線程來進行更新管道里面同步請求的消費
func (m *manager) Start() {
// 省略非核心代碼
go wait.Forever(func() {
select {
case syncRequest := <-m.podStatusChannel:
// 獲取最新的狀態信息,更新apiserver
klog.V(5).Infof("Status Manager: syncing pod: %q, with status: (%d, %v) from podStatusChannel",
syncRequest.podUID, syncRequest.status.version, syncRequest.status.status)
m.syncPod(syncRequest.podUID, syncRequest.status)
case <-syncTicker:
m.syncBatch()
}
}, 0)
}
同步條件檢測主要是檢測鏡像Pod的版本是否發送變化、Pod當前是否被刪除,如果pod沒有被刪除則返回false,即對一個沒有刪除的Pod我們還是需要繼續更新其狀態的
if !m.needsUpdate(uid, status) {
klog.V(1).Infof("Status for pod %q is up-to-date; skipping", uid)
return
}如果沒有獲取到Pod信息,則直接進行退出即可
pod, err := m.kubeClient.CoreV1().Pods(status.podNamespace).Get(status.podName, metav1.GetOptions{})
if errors.IsNotFound(err) {
klog.V(3).Infof("Pod %q does not exist on the server", format.PodDesc(status.podName, status.podNamespace, uid))
// 如果Pod已經被刪除了,就直接退出就行
return
}
if err != nil {
klog.Warningf("Failed to get status for pod %q: %v", format.PodDesc(status.podName, status.podNamespace, uid), err)
return
}
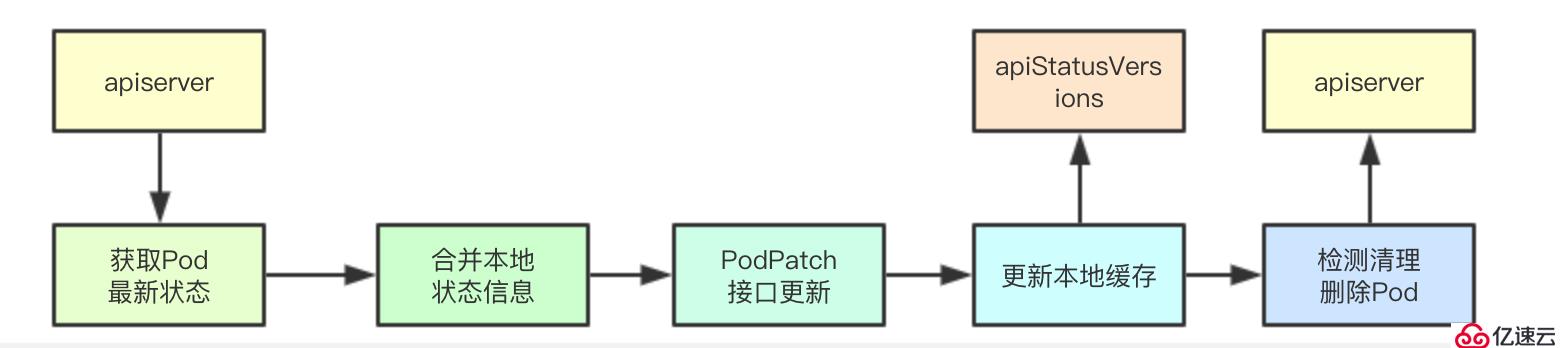
這里面會通過將最小的狀態與之前的狀態來進行merge合并,然后調用kubeClient進行apiserver端狀態的修改
oldStatus := pod.Status.DeepCopy()
// 更新服務端的狀態
newPod, patchBytes, err := statusutil.PatchPodStatus(m.kubeClient, pod.Namespace, pod.Name, pod.UID, *oldStatus, mergePodStatus(*oldStatus, status.status))
klog.V(3).Infof("Patch status for pod %q with %q", format.Pod(pod), patchBytes)
if err != nil {
klog.Warningf("Failed to update status for pod %q: %v", format.Pod(pod), err)
return
} // 當前是最新的狀態
pod = newPod
klog.V(3).Infof("Status for pod %q updated successfully: (%d, %+v)", format.Pod(pod), status.version, status.status)
m.apiStatusVersions[kubetypes.MirrorPodUID(pod.UID)] = status.version這里主要是最后階段,即Pod對應的資源都已經釋放了,則才最終刪除apiserver端的Pod
// 如果pod的DeletionTimestamp被設置,則對應的Pod需要被刪除
if m.canBeDeleted(pod, status.status) {
deleteOptions := metav1.NewDeleteOptions(0)
deleteOptions.Preconditions = metav1.NewUIDPreconditions(string(pod.UID))
// 調用apiserver對Pod進行刪除
err = m.kubeClient.CoreV1().Pods(pod.Namespace).Delete(pod.Name, deleteOptions)
if err != nil {
klog.Warningf("Failed to delete status for pod %q: %v", format.Pod(pod), err)
return
}
klog.V(3).Infof("Pod %q fully terminated and removed from etcd", format.Pod(pod))
m.deletePodStatus(uid)
}探活整體的設計大概就是這樣,希望大佬們多多關注,一起交流。
k8s源碼閱讀電子書地址: https://www.yuque.com/baxiaoshi/tyado3
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





