溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇文章給大家分享的是有關opencv-python+yolov3怎么實現目標檢測的內容。小編覺得挺實用的,因此分享給大家做個參考,一起跟隨小編過來看看吧。
目標檢測,粗略來說就是:輸入圖片/視頻,經過處理,得到:目標的位置信息(比如左上角和右下角的坐標)、目標的預測類別、目標的預測置信度(confidence)。
拿Faster R-CNN這個算法舉例:輸入一個batch(batch size也可以為1)的圖片或者視頻,網絡直接的outputs是這樣的:
[batchId, classId, confidence, left, top, right, bottom],batchId, classId, confidence, left, top, right, bottom都是標量。
batchId表示這一個batch中,這張圖片的id(也即index),后四個標量即目標的位置信息:左上角像素點和右下角像素點的坐標。
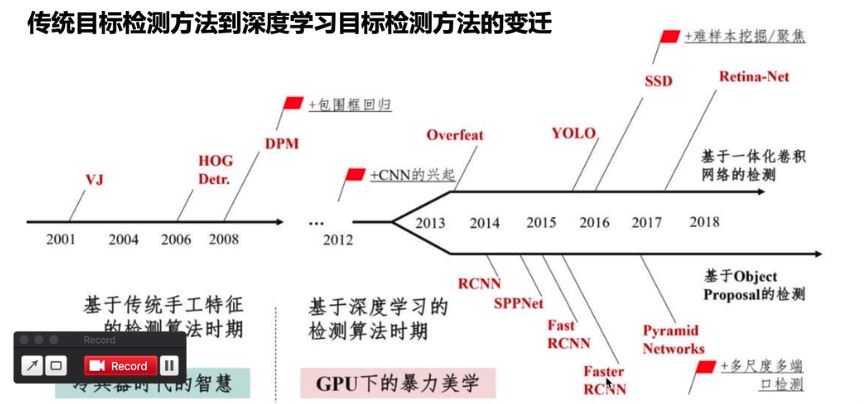
按照歷史脈絡來談:
手工特征提取算法,如VJ、HOG、DPM
R-CNN算法(2014),最早的基于深度學習的目標檢測器之一,其結構是兩級網絡:1)首先需要諸如選擇性搜索之類的算法來提出可能包含對象的候選邊界框;2)然后將這些區域傳遞到CNN算法進行分類;
R-CNN算法存在的問題是其仿真很慢,并且不是完整的端到端的目標檢測器。
Fast R-CNN算法(2014末),對原始R-CNN進行了相當大的改進:提高準確度,并減少執行正向傳遞所花費的時間。
但是,該模型仍然依賴于外部區域搜索算法。
faster R-CNN算法(2015),真正的端到端深度學習目標檢測器。刪除了選擇性搜索的要求,而是依賴于
(1)完全卷積的區域提議網絡(RPN, Region Purpose Network),可以預測對象邊界框和“對象”分數(量化它是一個區域的可能性的分數)。
(2)然后將RPN的輸出傳遞到R-CNN組件以進行最終分類和標記。
R-CNN系列算法,都采取了two-stage策略。特點是:雖然檢測結果一般都非常準確,但仿真速度非常慢,即使是在GPU上也僅獲得5 FPS。
one-stage方法有:yolo(2015)、SSD(2015末),以及在這兩個算法基礎上改進的各論文提出的算法。這些算法的基本思路是:均勻地在圖片的不同位置進行密集抽樣,抽樣時可以采用不同尺度和長寬比,然后利用CNN提取特征后直接進行分類與回歸。
整個過程只需要一步,所以其優勢是速度快,但是訓練比較困難。
yolov3(2018)是yolo作者提出的第三個版本(之前還提過yolov2和它們的tinny版本,tinny版本經過壓縮更快但是也降低了準確率)。yolov3支持80類物體的目標檢測,完整列表[戳這里]: https://github.com/pjreddie/darknet/blob/master/data/coco.names
時間線:
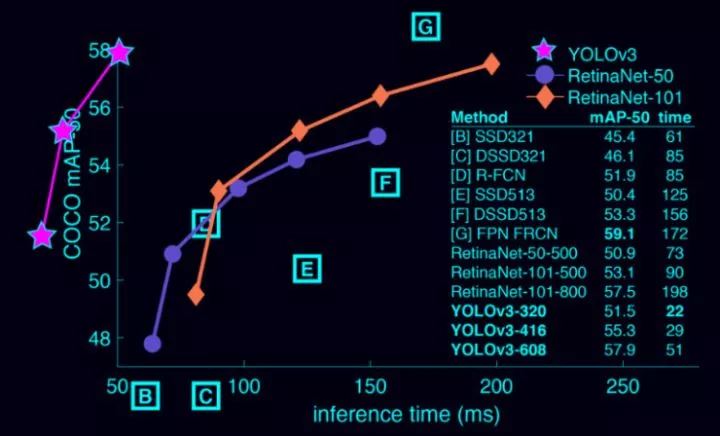
首先,套路,yolov3很強大(不強大我用它干啥呢)。速度上,它比 R-CNN 快 1000 倍,比 Fast R-CNN 快 100 倍。檢測準確率上,它不是最準的:YOLOv3-608比 DSSD 更高,接近 FPN。但是它的速度不到后二者的1/3。
從下圖也可以看出:
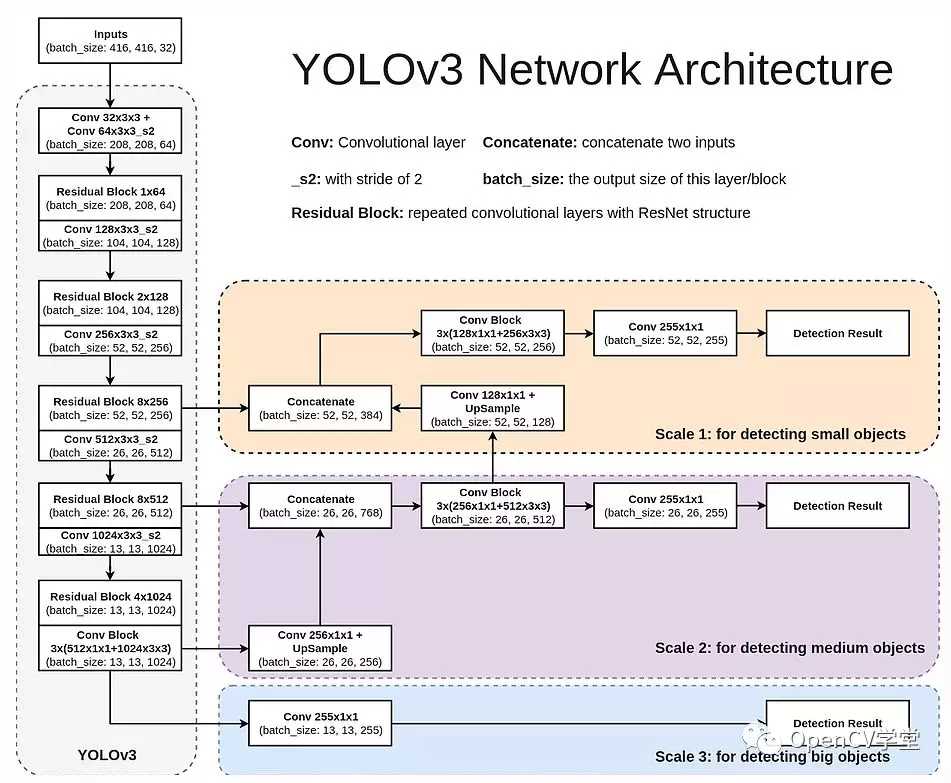
可以看出,他是一系列卷積、殘差、上采樣組成的。特點在于,它將預測分在三個尺度(Scale)進行(見圖中三個彩色框),也在三個scale分別輸出。
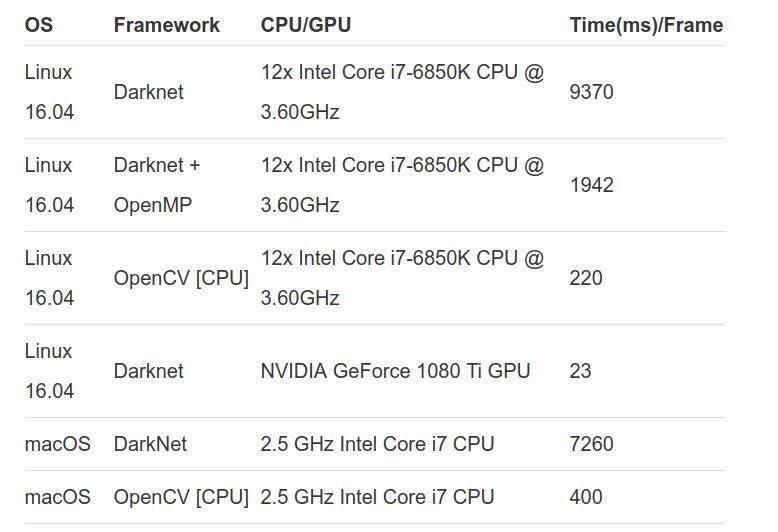
opencv( 3.4.2+版本)的dnn(Deep Neural Network-DNN)模塊封裝了Darknet框架,這個框架是
自己寫的,它由封裝了yolo算法。因為這么一層關系,我們可以使用opencv方便地使用yolo的各個版本,而且有數據(見下)證明OpenCV的DNN模塊在 CPU的實現速度比使用 OpenML 的 Darknet 快9倍。
我會先結合腳本片段講解,再給出該腳本的完整代碼,講解。
先
引庫
import numpy as np import cv2 as cv import os import time
參數:
yolo_dir = '/home/hessesummer/github/NTS-Net-my/yolov3' # YOLO文件路徑 weightsPath = os.path.join(yolo_dir, 'yolov3.weights') # 權重文件 configPath = os.path.join(yolo_dir, 'yolov3.cfg') # 配置文件 labelsPath = os.path.join(yolo_dir, 'coco.names') # label名稱 imgPath = os.path.join(yolo_dir, 'test.jpg') # 測試圖像 CONFIDENCE = 0.5 # 過濾弱檢測的最小概率 THRESHOLD = 0.4 # 非最大值抑制閾值
權重文件、配置文件、label名稱的下載地址:
wget https://pjreddie.com/media/files/yolov3.weights wget https://github.com/pjreddie/darknet/blob/master/cfg/yolov3.cfg wget https://github.com/pjreddie/darknet/blob/master/data/coco.names
簡單來說:
過濾弱檢測的最小概率:置信度小于這個值的輸出都不要了;
非最大值抑制閾值:允許框框重疊的程度(多框框檢測同一個物體),供下面的NMS算法使用,該算法會根據該值將有重疊的框框合并。值為0時,不允許框框重疊。默認值是0.3。
詳細來說:
我沒查。您自己感興趣再了解吧。
重頭戲1:
# 加載網絡、配置權重
net = cv.dnn.readNetFromDarknet(configPath, weightsPath) ## 利用下載的文件
# print("[INFO] loading YOLO from disk...") ## 可以打印下信息
# 加載圖片、轉為blob格式、送入網絡輸入層
img = cv.imread(imgPath)
blobImg = cv.dnn.blobFromImage(img, 1.0/255.0, (416, 416), None, True, False) ## net需要的輸入是blob格式的,用blobFromImage這個函數來轉格式
net.setInput(blobImg) ## 調用setInput函數將圖片送入輸入層
# 獲取網絡輸出層信息(所有輸出層的名字),設定并前向傳播
outInfo = net.getUnconnectedOutLayersNames() ## 前面的yolov3架構也講了,yolo在每個scale都有輸出,outInfo是每個scale的名字信息,供net.forward使用
# start = time.time()
layerOutputs = net.forward(outInfo) # 得到各個輸出層的、各個檢測框等信息,是二維結構。
# end = time.time()
# print("[INFO] YOLO took {:.6f} seconds".format(end - start)) ## 可以打印下信息layerOutputs是二維結構,第0維代表哪個輸出層,第1維代表各個檢測框。
其他的我都在注釋里講解了。
重頭戲2:
# 拿到圖片尺寸 (H, W) = img.shape[:2]
供下面使用:
# 過濾layerOutputs
# layerOutputs的第1維的元素內容: [center_x, center_y, width, height, objectness, N-class score data]
# 過濾后的結果放入:
boxes = [] # 所有邊界框(各層結果放一起)
confidences = [] # 所有置信度
classIDs = [] # 所有分類ID
# # 1)過濾掉置信度低的框框
for out in layerOutputs: # 各個輸出層
for detection in out: # 各個框框
# 拿到置信度
scores = detection[5:] # 各個類別的置信度
classID = np.argmax(scores) # 最高置信度的id即為分類id
confidence = scores[classID] # 拿到置信度
# 根據置信度篩查
if confidence > CONFIDENCE:
box = detection[0:4] * np.array([W, H, W, H]) # 將邊界框放會圖片尺寸
(centerX, centerY, width, height) = box.astype("int")
x = int(centerX - (width / 2))
y = int(centerY - (height / 2))
boxes.append([x, y, int(width), int(height)])
confidences.append(float(confidence))
classIDs.append(classID)
# # 2)應用非最大值抑制(non-maxima suppression,nms)進一步篩掉
idxs = cv.dnn.NMSBoxes(boxes, confidences, CONFIDENCE, THRESHOLD) # boxes中,保留的box的索引index存入idxs這里的NMS算法就是前面提到的NMS算法。
應用檢測結果,這里是畫出框框。
# 得到labels列表
with open(labelsPath, 'rt') as f:
labels = f.read().rstrip('\n').split('\n')供下面使用:
# 應用檢測結果
np.random.seed(42)
COLORS = np.random.randint(0, 255, size=(len(labels), 3), dtype="uint8") # 框框顯示顏色,每一類有不同的顏色,每種顏色都是由RGB三個值組成的,所以size為(len(labels), 3)
if len(idxs) > 0:
for i in idxs.flatten(): # indxs是二維的,第0維是輸出層,所以這里把它展平成1維
(x, y) = (boxes[i][0], boxes[i][1])
(w, h) = (boxes[i][2], boxes[i][3])
color = [int(c) for c in COLORS[classIDs[i]]]
cv.rectangle(img, (x, y), (x+w, y+h), color, 2) # 線條粗細為2px
text = "{}: {:.4f}".format(labels[classIDs[i]], confidences[i])
cv.putText(img, text, (x, y-5), cv.FONT_HERSHEY_SIMPLEX, 0.5, color, 2) # cv.FONT_HERSHEY_SIMPLEX字體風格、0.5字體大小、粗細2px
cv.imshow('目標檢測結果', img)
cv.waitKey(0)第一部分講解結束,下面放完整代碼:
再
import numpy as np
import cv2 as cv
import os
import time
yolo_dir = '/home/hessesummer/github/NTS-Net-my/yolov3' # YOLO文件路徑
weightsPath = os.path.join(yolo_dir, 'yolov3.weights') # 權重文件
configPath = os.path.join(yolo_dir, 'yolov3.cfg') # 配置文件
labelsPath = os.path.join(yolo_dir, 'coco.names') # label名稱
imgPath = os.path.join(yolo_dir, 'test.jpg') # 測試圖像
CONFIDENCE = 0.5 # 過濾弱檢測的最小概率
THRESHOLD = 0.4 # 非最大值抑制閾值
# 加載網絡、配置權重
net = cv.dnn.readNetFromDarknet(configPath, weightsPath) # # 利用下載的文件
print("[INFO] loading YOLO from disk...") # # 可以打印下信息
# 加載圖片、轉為blob格式、送入網絡輸入層
img = cv.imread(imgPath)
blobImg = cv.dnn.blobFromImage(img, 1.0/255.0, (416, 416), None, True, False) # # net需要的輸入是blob格式的,用blobFromImage這個函數來轉格式
net.setInput(blobImg) # # 調用setInput函數將圖片送入輸入層
# 獲取網絡輸出層信息(所有輸出層的名字),設定并前向傳播
outInfo = net.getUnconnectedOutLayersNames() # # 前面的yolov3架構也講了,yolo在每個scale都有輸出,outInfo是每個scale的名字信息,供net.forward使用
start = time.time()
layerOutputs = net.forward(outInfo) # 得到各個輸出層的、各個檢測框等信息,是二維結構。
end = time.time()
print("[INFO] YOLO took {:.6f} seconds".format(end - start)) # # 可以打印下信息
# 拿到圖片尺寸
(H, W) = img.shape[:2]
# 過濾layerOutputs
# layerOutputs的第1維的元素內容: [center_x, center_y, width, height, objectness, N-class score data]
# 過濾后的結果放入:
boxes = [] # 所有邊界框(各層結果放一起)
confidences = [] # 所有置信度
classIDs = [] # 所有分類ID
# # 1)過濾掉置信度低的框框
for out in layerOutputs: # 各個輸出層
for detection in out: # 各個框框
# 拿到置信度
scores = detection[5:] # 各個類別的置信度
classID = np.argmax(scores) # 最高置信度的id即為分類id
confidence = scores[classID] # 拿到置信度
# 根據置信度篩查
if confidence > CONFIDENCE:
box = detection[0:4] * np.array([W, H, W, H]) # 將邊界框放會圖片尺寸
(centerX, centerY, width, height) = box.astype("int")
x = int(centerX - (width / 2))
y = int(centerY - (height / 2))
boxes.append([x, y, int(width), int(height)])
confidences.append(float(confidence))
classIDs.append(classID)
# # 2)應用非最大值抑制(non-maxima suppression,nms)進一步篩掉
idxs = cv.dnn.NMSBoxes(boxes, confidences, CONFIDENCE, THRESHOLD) # boxes中,保留的box的索引index存入idxs
# 得到labels列表
with open(labelsPath, 'rt') as f:
labels = f.read().rstrip('\n').split('\n')
# 應用檢測結果
np.random.seed(42)
COLORS = np.random.randint(0, 255, size=(len(labels), 3), dtype="uint8") # 框框顯示顏色,每一類有不同的顏色,每種顏色都是由RGB三個值組成的,所以size為(len(labels), 3)
if len(idxs) > 0:
for i in idxs.flatten(): # indxs是二維的,第0維是輸出層,所以這里把它展平成1維
(x, y) = (boxes[i][0], boxes[i][1])
(w, h) = (boxes[i][2], boxes[i][3])
color = [int(c) for c in COLORS[classIDs[i]]]
cv.rectangle(img, (x, y), (x+w, y+h), color, 2) # 線條粗細為2px
text = "{}: {:.4f}".format(labels[classIDs[i]], confidences[i])
cv.putText(img, text, (x, y-5), cv.FONT_HERSHEY_SIMPLEX, 0.5, color, 2) # cv.FONT_HERSHEY_SIMPLEX字體風格、0.5字體大小、粗細2px
cv.imshow('detected image', img)
cv.waitKey(0)結果:

感謝各位的閱讀!關于“opencv-python+yolov3怎么實現目標檢測”這篇文章就分享到這里了,希望以上內容可以對大家有一定的幫助,讓大家可以學到更多知識,如果覺得文章不錯,可以把它分享出去讓更多的人看到吧!
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





