溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
什么是SLAM 技術?很多新手對此不是很清楚,為了幫助大家解決這個難題,下面小編將為大家詳細講解,有這方面需求的人可以來學習下,希望你能有所收獲。
SLAM技術是指同時定位與建圖,其意思是機器人在自身位置不確定的條件下,在完全未知環境中創建地圖,同時利用地圖進行自主定位和導航,因此可知SLAM的主要工作是定位以及建圖。
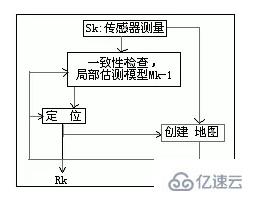
SLAM的基本過程
機器人在未知環境中從一個未知位置開始移動,在移動過程中根據位置估計和傳感器數據進行自身定位,同時建造增量式地圖。
(1)定位(localization):機器人必須知道自己在環境中位置。
(2)建圖(mapping):機器人必須記錄環境中特征的位置(如果知道自己的位置)
(3)SLAM:機器人在定位的同時建立環境地圖。其基本原理是運過概率統計的方法,通過多特征匹配來達到定位和減少定位誤差的。
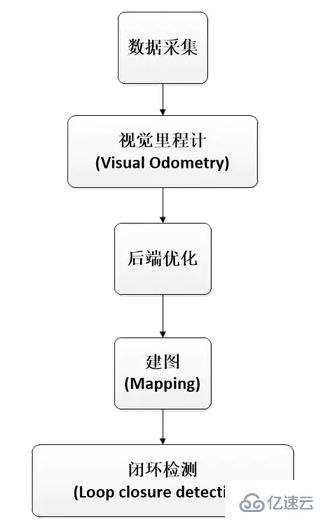
SLAM的主要模塊
視覺SLAM主要分為幾個模塊:數據采集、視覺里程計(Visual Odometry)、后端優化、建圖(Mapping)、閉環檢測(Loop closure detection)。如下圖所示:
看完上述內容是否對您有幫助呢?如果還想對相關知識有進一步的了解或閱讀更多相關文章,請關注億速云行業資訊頻道,感謝您對億速云的支持。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





