溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
作者 | 至天?阿里巴巴高級研發工程師
在使用存儲時,為了提高數據操作的容錯性,我們通常有需要對線上數據進行 snapshot ,以及能快速 restore 的能力。另外,當需要對線上數據進行快速的復制以及遷移等動作,如進行環境的復制、數據開發等功能時,都可以通過存儲快照來滿足需求,而 K8s 中通過 CSI Snapshotter controller 來實現存儲快照的功能。
我們知道,K8s 中通過 pvc 以及 pv 的設計體系來簡化用戶對存儲的使用,而存儲快照的設計其實是仿照? pvc & pv 體系的設計思想。當用戶需要存儲快照的功能時,可以通過 VolumeSnapshot 對象來聲明,并指定相應的 VolumeSnapshotClass 對象,之后由集群中的相關組件動態生成存儲快照以及存儲快照對應的對象 VolumeSnapshotContent 。如下對比圖所示,動態生成 VolumeSnapshotContent 和動態生成 pv 的流程是非常相似的。
cdn.com/acb0479b57c985f69d45f6d5062471cc62e1abac.png">
有了存儲快照之后,如何將快照數據快速恢復過來呢?如下圖所示:
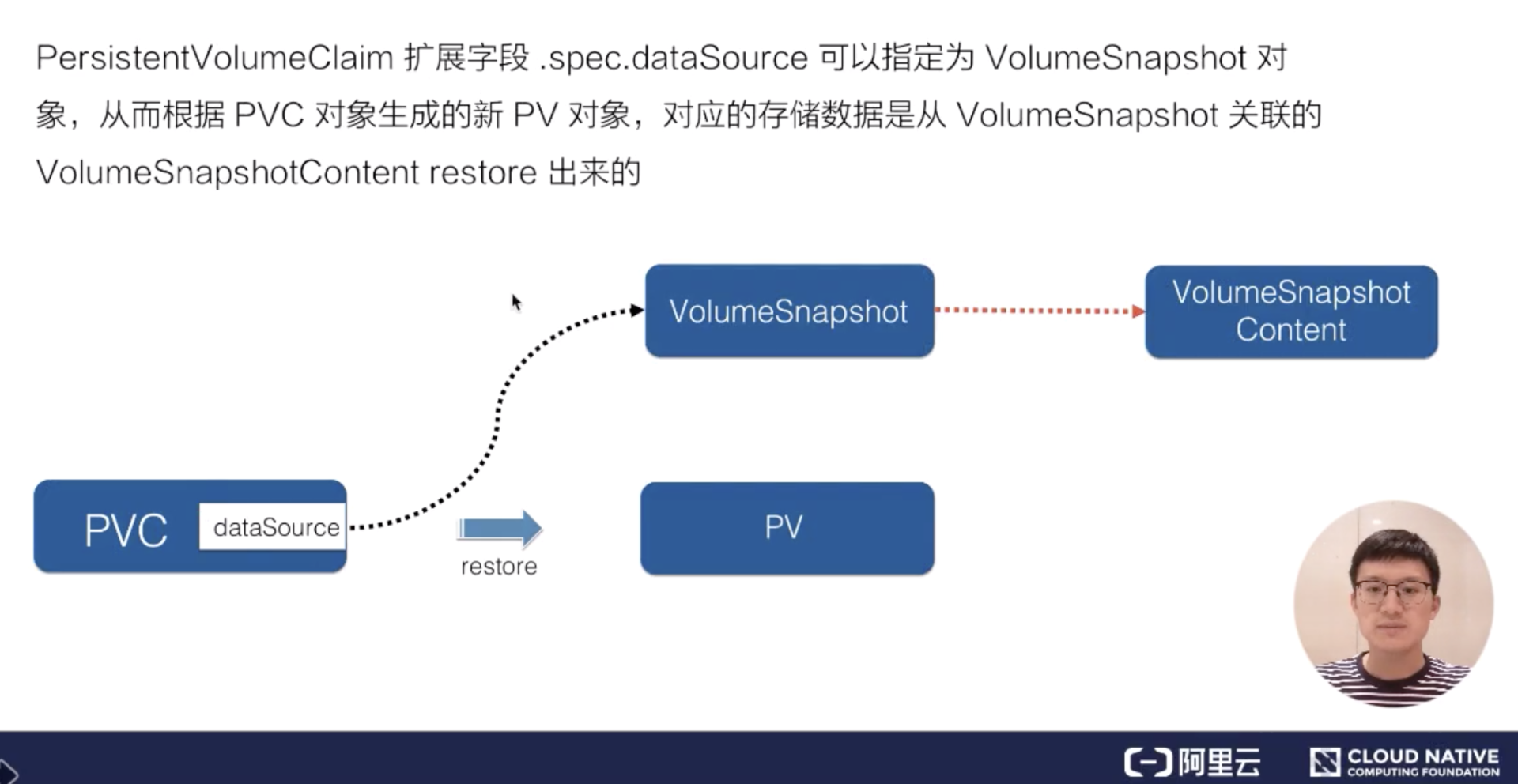
如上所示的流程,可以借助 PVC 對象將其的 dataSource 字段指定為 VolumeSnapshot 對象。這樣當 PVC 提交之后,會由集群中的相關組件找到 dataSource 所指向的存儲快照數據,然后新創建對應的存儲以及 pv 對象,將存儲快照數據恢復到新的 pv 中,這樣數據就恢復回來了,這就是存儲快照的 restore 用法。
首先了解一下拓撲是什么意思:這里所說的拓撲是 K8s 集群中為管理的 nodes 劃分的一種“位置”關系,意思為:可以通過在 node 的 labels 信息里面填寫某一個 node 屬于某一個拓撲。<br />?<br />常見的有三種,這三種在使用時經常會遇到的:
第一種,在使用云存儲服務的時候,經常會遇到?region,也就是地區的概念,在 K8s 中常通過 label?failure-domain.beta.kubernetes.io/region 來標識。這個是為了標識單個 K8s 集群管理的跨 region 的 nodes 到底屬于哪個地區;
第二種,比較常用的是可用區,也就是?available?zone,在 K8s 中常通過 label failure-domain.beta.kubernetes.io/zone 來標識。這個是為了標識單個 K8s 集群管理的跨 zone 的 nodes 到底屬于哪個可用區;
上面講到的三個拓撲是比較常用的,而拓撲其實是可以自己定義的。可以定義一個字符串來表示一個拓撲域,這個 key 所對應的值其實就是拓撲域下不同的拓撲位置。
舉個例子:可以用?rack,也就是機房中的機架這個緯度來做一個拓撲域。這樣就可以將不同機架 ( rack ) 上面的機器標記為不同的拓撲位置,也就是說可以將不同機架上機器的位置關系通過 rack 這個緯度來標識。屬于 rack1 上的機器,node label 中都添加 rack 的標識,它的 value 就標識成 rack1,即 rack=rack1;另外一組機架上的機器可以標識為 rack=rack2,這樣就可以通過機架的緯度就來區分來 K8s 中的 node 所處的位置。
接下來就一起來看看拓撲在 K8s 存儲中的使用。
上一節課我們說過,K8s 中通過 PV 的 PVC 體系將存儲資源和計算資源分開管理了。如果創建出來的 PV有"訪問位置"的限制,也就是說,它通過 nodeAffinity 來指定哪些 node 可以訪問這個 PV。為什么會有這個訪問位置的限制?
因為在 K8s 中創建 pod 的流程和創建 PV 的流程,其實可以認為是并行進行的,這樣的話,就沒有辦法來保證 pod 最終運行的 node 是能訪問到 有位置限制的 PV 對應的存儲,最終導致 pod 沒法正常運行。這里來舉兩個經典的例子:
首先來看一下?Local PV 的例子,Local PV 是將一個 node 上的本地存儲封裝為 PV,通過使用 PV 的方式來訪問本地存儲。為什么會有 Local PV 的需求呢?簡單來說,剛開始使用 PV 或 PVC 體系的時候,主要是用來針對分布式存儲的,分布式存儲依賴于網絡,如果某些業務對 I/O 的性能要求非常高,可能通過網絡訪問分布式存儲沒辦法滿足它的性能需求。這個時候需要使用本地存儲,刨除了網絡的 overhead,性能往往會比較高。但是用本地存儲也是有壞處的!分布式存儲可以通過多副本來保證高可用,但本地存儲就需要業務自己用類似 Raft 協議來實現多副本高可用。
接下來看一下 Local PV 場景可能如果沒有對 PV 做“訪問位置”的限制會遇到什么問題?
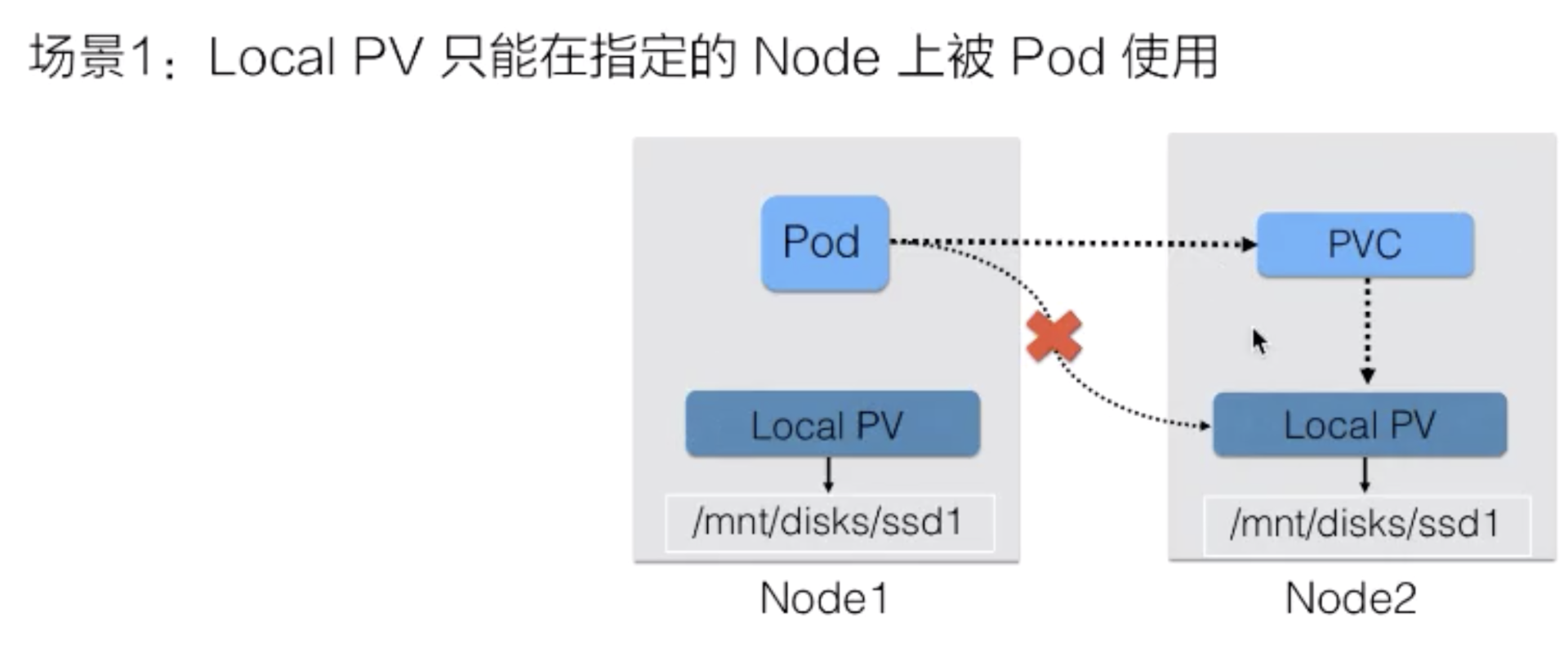
當用戶在提交完 PVC 的時候,K8s PV controller可能綁定的是 node2 上面的 PV。但是,真正使用這個 PV 的 pod,在被調度的時候,有可能調度在 node1 上,最終導致這個 pod 在起來的時候沒辦法去使用這塊存儲,因為 pod 真實情況是要使用 node2 上面的存儲。
第二個(如果不對 PV 做“訪問位置”的限制會出問題的)場景:
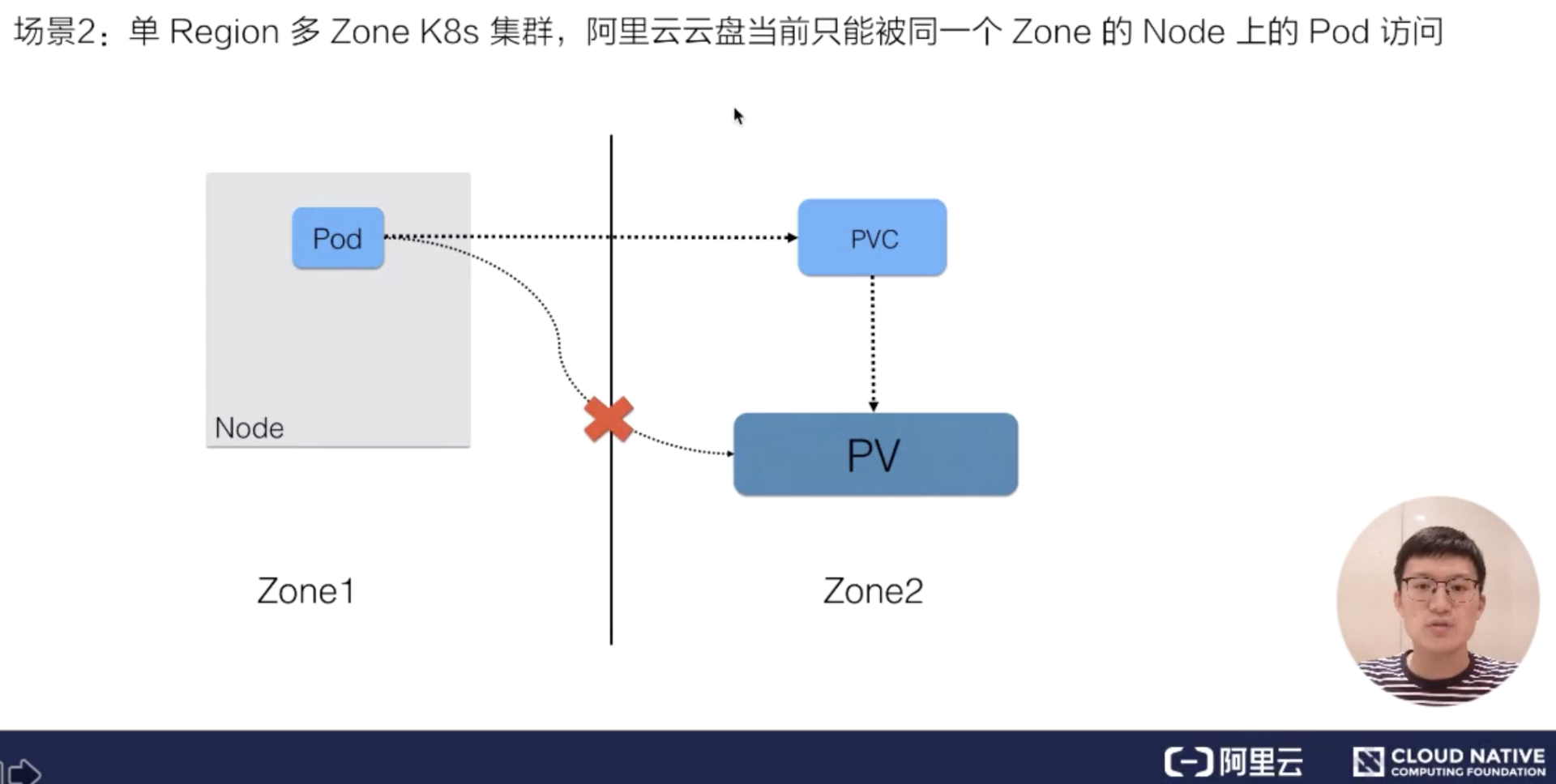
如果搭建的 K8s 集群管理的 nodes 分布在單個區域多個可用區內。在創建動態存儲的時候,創建出來的存儲屬于可用區 2,但之后在提交使用該存儲的 pod,它可能會被調度到可用區 1 了,那就可能沒辦法使用這塊存儲。因此像阿里云的云盤,也就是塊存儲,當前不能跨可用區使用,如果創建的存儲其實屬于可用區 2,但是 pod 運行在可用區 1,就沒辦法使用這塊存儲,這是第二個常見的問題場景。
接下來我們來看看 K8s 中如何通過存儲拓撲調度來解決上面的問題的。
首先總結一下之前的兩個問題,它們都是 PV 在給 PVC 綁定或者動態生成 PV 的時候,我并不知道后面將使用它的 pod 將調度在哪些 node 上。但 PV 本身的使用,是對 pod 所在的 node 有拓撲位置的限制的,如 Local PV 場景是我要調度在指定的 node 上我才能使用那塊 PV,而對第二個問題場景就是說跨可用區的話,必須要在將使用該 PV 的 pod 調度到同一個可用區的 node 上才能使用阿里云云盤服務,那 K8s 中怎樣去解決這個問題呢?
簡單來說,在 K8s 中將 PV 和 PVC 的 binding 操作和動態創建 PV 的操作做了 delay,delay 到 pod 調度結果出來之后,再去做這兩個操作。這樣的話有什么好處?
為了實現上面所說的延遲綁定和延遲創建 PV,需要在 K8s 中的改動涉及到的相關組件有三個:
這就是存儲拓撲調度的相關知識。
接下來通過 yaml 用例來解讀一下第一部分的基本知識。
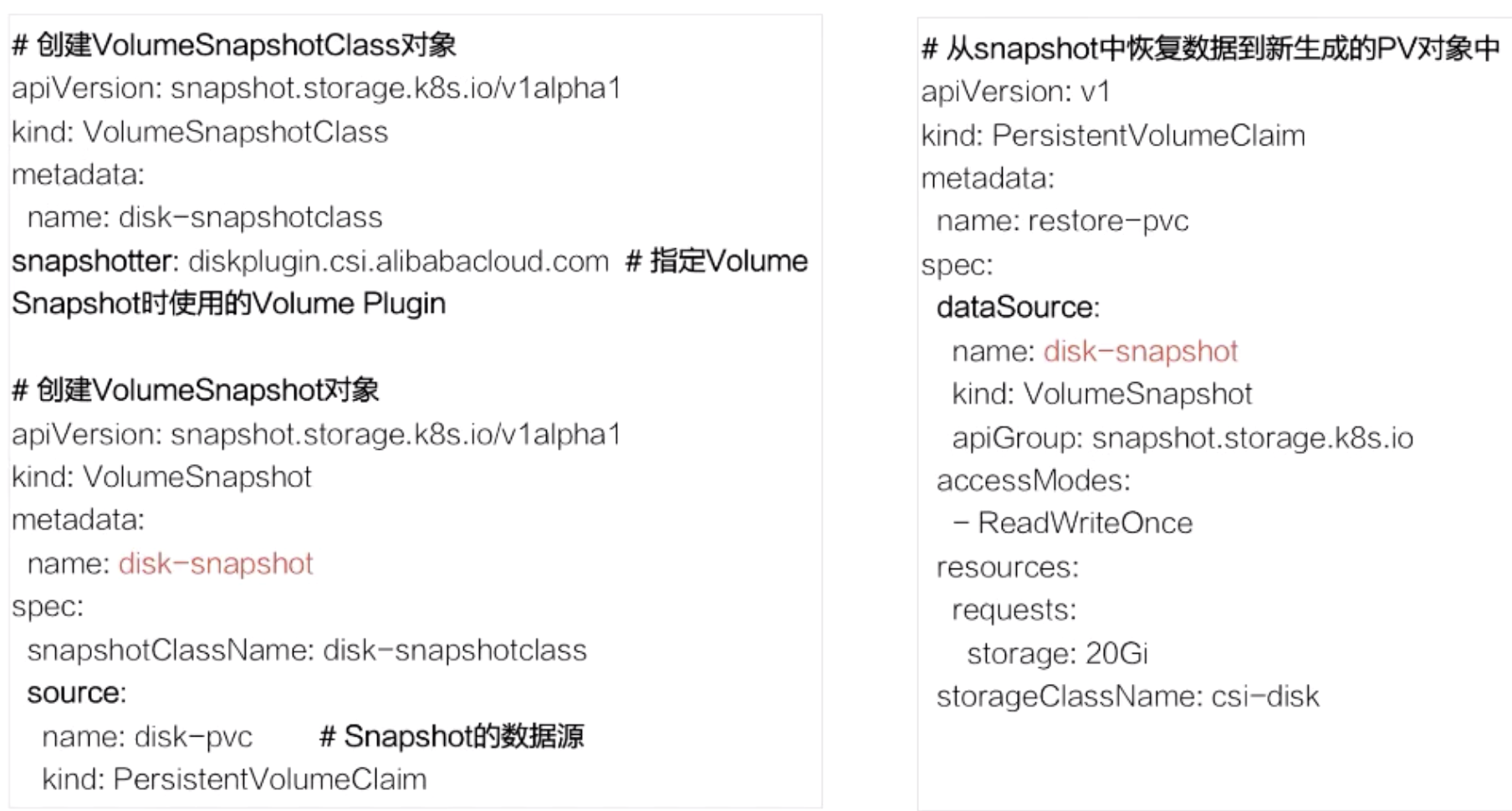
下面來看一下存儲快照如何使用:首先需要集群管理員,在集群中創建 VolumeSnapshotClass 對象,VolumeSnapshotClass 中一個重要字段就是 Snapshot,它是指定真正創建存儲快照所使用的卷插件,這個卷插件是需要提前部署的,稍后再說這個卷插件。
接下來用戶他如果要做真正的存儲快照,需要聲明一個 VolumeSnapshotClass , VolumeSnapshotClass 首先它要指定的是 VolumeSnapshotClassName,接著它要指定的一個非常重要的字段就是 source,這個 source 其實就是指定快照的數據源是啥。這個地方指定 name 為 disk-pvc,也就是說通過這個 pvc 對象來創建存儲快照。提交這個 VolumeSnapshot 對象之后,集群中的相關組件它會找到這個 PVC 對應的 PV 存儲,對這個 PV 存儲做一次快照。
有了存儲快照之后,那接下來怎么去用存儲快照恢復數據呢?這個其實也很簡單,通過聲明一個新的 PVC 對象并在它的 spec 下面的 DataSource 中來聲明我的數據源來自于哪個 VolumeSnapshot,這里指定的是 disk-snapshot 對象,當我這個 PVC 提交之后,集群中的相關組件,它會動態生成新的 PV 存儲,這個新的 PV 存儲中的數據就來源于這個 Snapshot 之前做的存儲快照。
如下圖看一下 Local PV 的 yaml 示例:
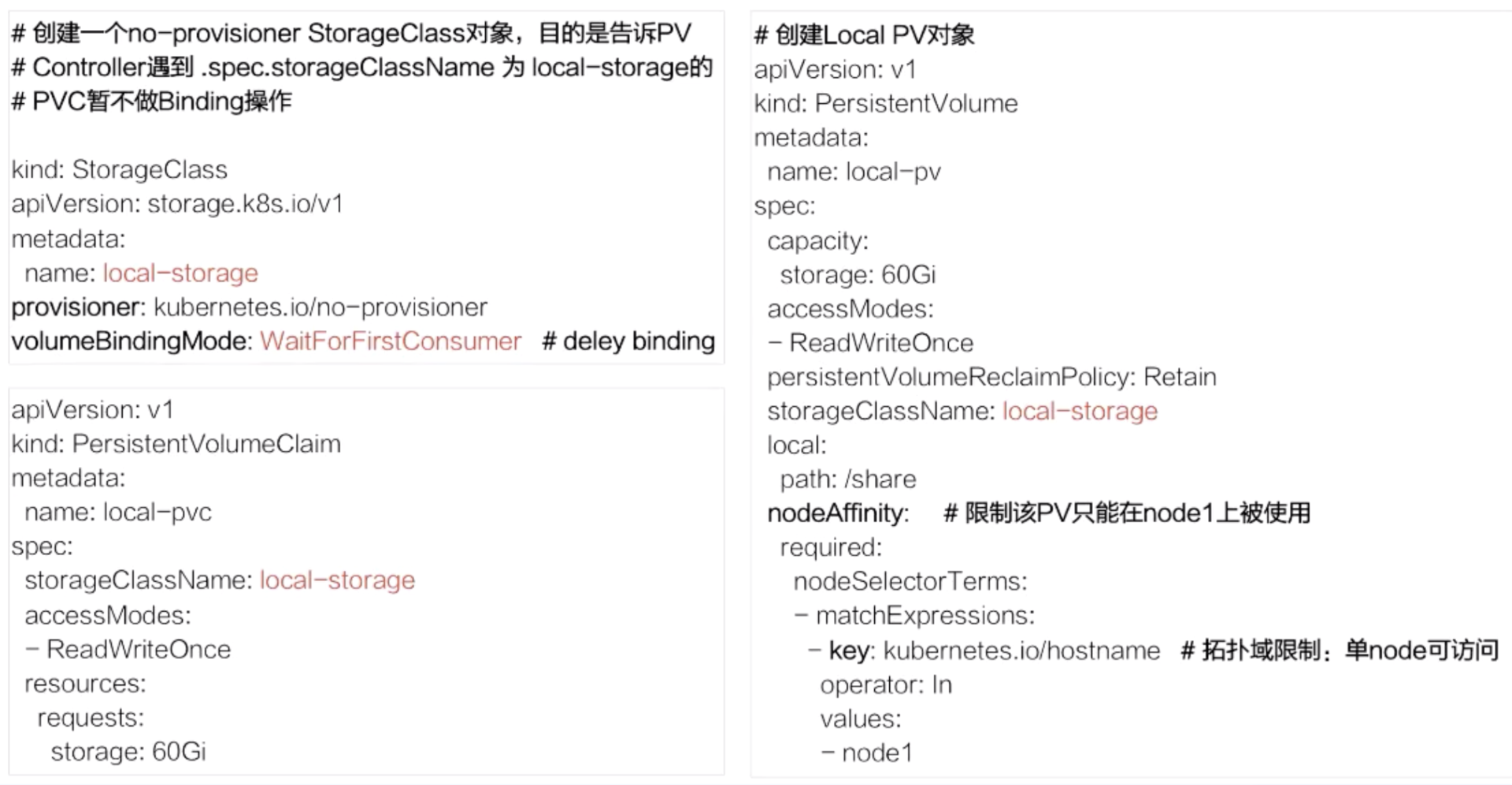
Local PV 大部分使用的時候都是通過靜態創建的方式,也就是要先去聲明 PV 對象,既然 Local PV 只能是本地訪問,就需要在聲明 PV 對象的,在 PV 對象中通過 nodeAffinity 來限制我這個 PV 只能在單 node 上訪問,也就是給這個 PV 加上拓撲限制。如上圖拓撲的 key 用 kubernetes.io/hostname 來做標記,也就是只能在 node1 訪問。如果想用這個 PV,你的 pod 必須要調度到 node1 上。
既然是靜態創建 PV 的方式,這里為什么還需要 storageClassname 呢?前面也說了,在 Local PV 中,如果要想讓它正常工作,需要用到延遲綁定特性才行,那既然是延遲綁定,當用戶在寫完 PVC 提交之后,即使集群中有相關的 PV 能跟它匹配,它也暫時不能做匹配,也就是說 PV controller 不能馬上去做 binding,這個時候你就要通過一種手段來告訴 PV controller,什么情況下是不能立即做?binding。這里的 storageClass 就是為了起到這個副作用,我們可以看到 storageClass 里面的 provisioner 指定的是?no-provisioner,其實就是相當于告訴 K8s 它不會去動態創建 PV,它主要用到 storageclass 的VolumeBindingMode 字段,叫 WaitForFirstConsumer,可以先簡單地認為它是延遲綁定。
當用戶開始提交 PVC 的時候,pv controller 在看到這個 pvc 的時候,它會找到相應的 storageClass,發現這個 BindingMode 是延遲綁定,它就不會做任何事情。
之后當真正使用這個 pvc 的 pod,在調度的時候,當它恰好調度在符合 pv nodeaffinity 的 node 的上面后,這個 pod 里面所使用的 PVC 才會真正地與 PV 做綁定,這樣就保證我 pod 調度到這臺 node 上之后,這個 PVC 才與這個 PV 綁定,最終保證的是創建出來的 pod 能訪問這塊 Local PV,也就是靜態 Provisioning 場景下怎么去滿足 PV 的拓撲限制。
再看一下動態 Provisioning PV 的時候,怎么去做拓撲限制的?

動態就是指動態創建 PV 就有拓撲位置的限制,那怎么去指定?
首先在 storageclass 還是需要指定 BindingMode,就是 WaitForFirstConsumer,就是延遲綁定。
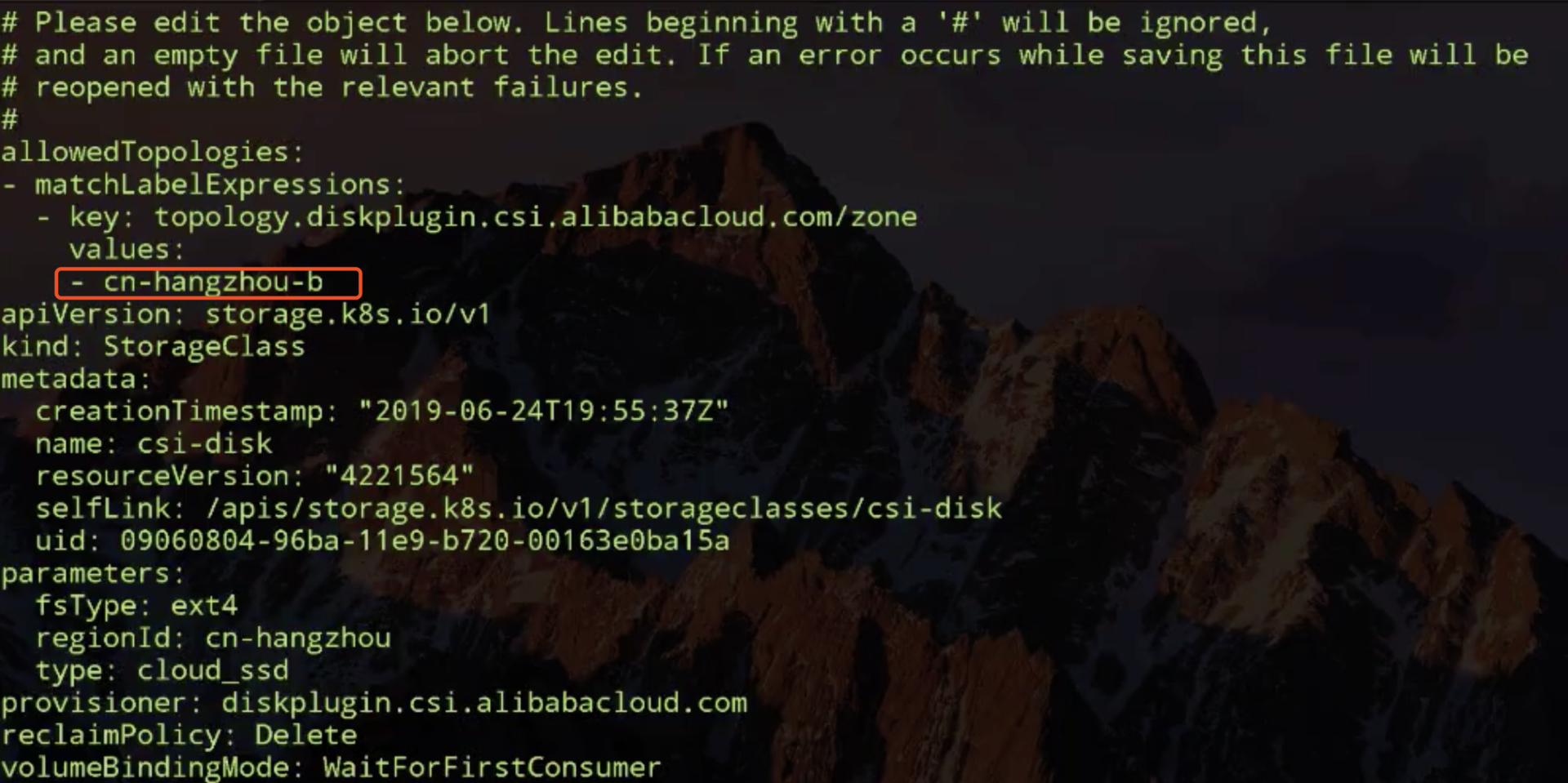
其次特別重要的一個字段就是?allowedTopologies,限制就在這個地方。上圖中可以看到拓撲限制是可用區的級別,這里其實有兩層意思:
總之,就是要從兩方面保證,一是動態創建出來的存儲時要能被這個可用區訪問的,二是我調度器在選擇 node 的時候,要落在這個可用區內的,這樣的話就保證我的存儲和我要使用存儲的這個 pod 它所對應的 node,它們之間的拓撲域是在同一個拓撲域,用戶在寫 PVC 文件的時候,寫法是跟以前的寫法是一樣的,主要是在 storageclass 中要做一些拓撲限制。
本節將在線上環境來演示一下前面講解的內容。
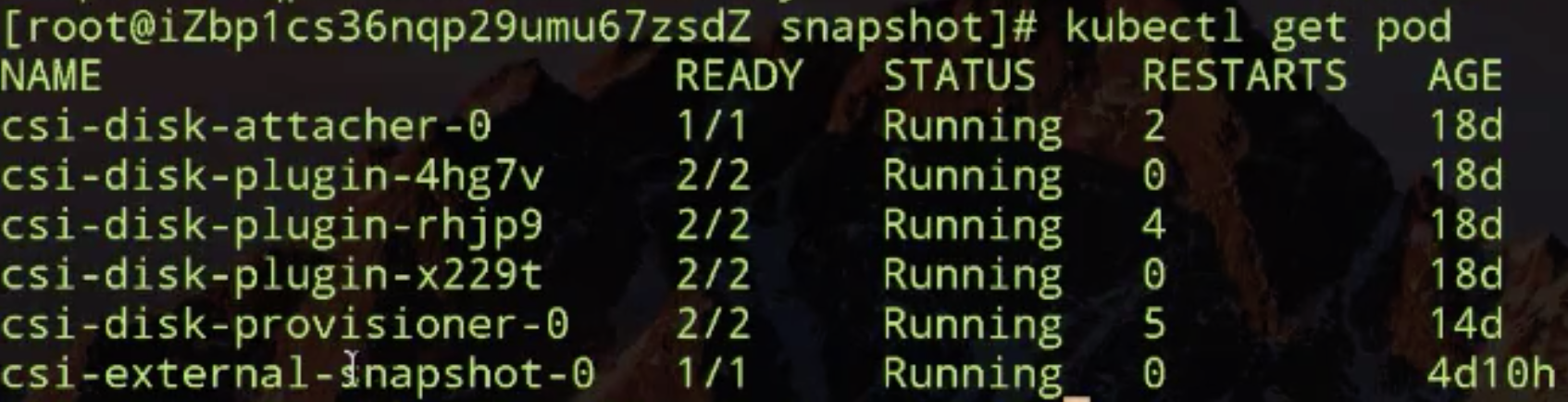
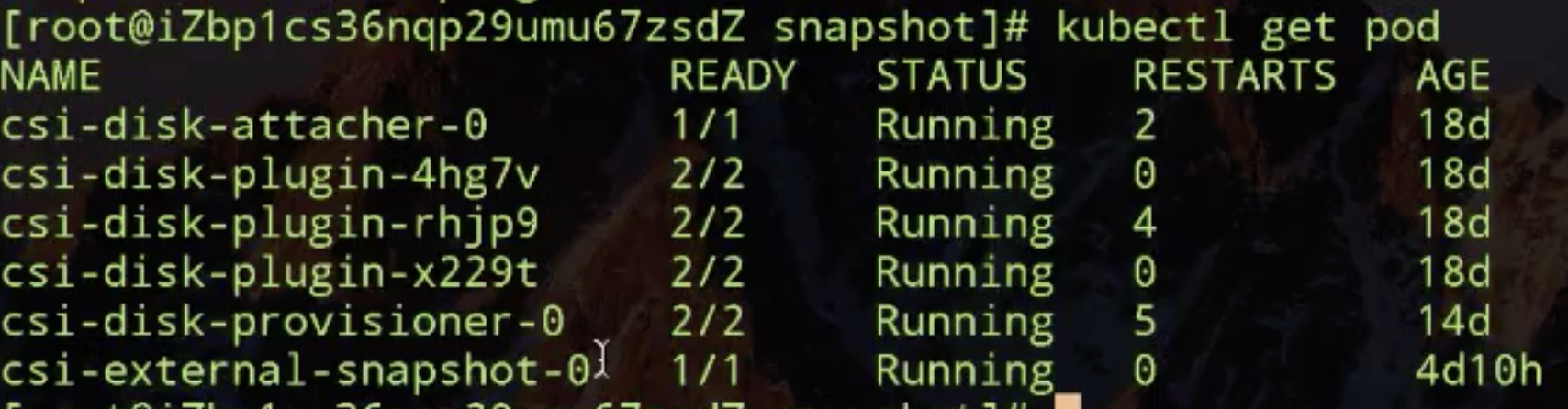
首先來看一下我的阿里云服務器上搭建的 K8s 服務。總共有 3 個 node 節點。一個 master 節點,兩個 node。其中 master 節點是不能調度 pod 的。

再看一下,我已經提前把我需要的插件已經布好了,一個是 snapshot 插件? ( csi-external-snapshot ) ,一個是動態云盤的插件? ( csi-disk ) 。
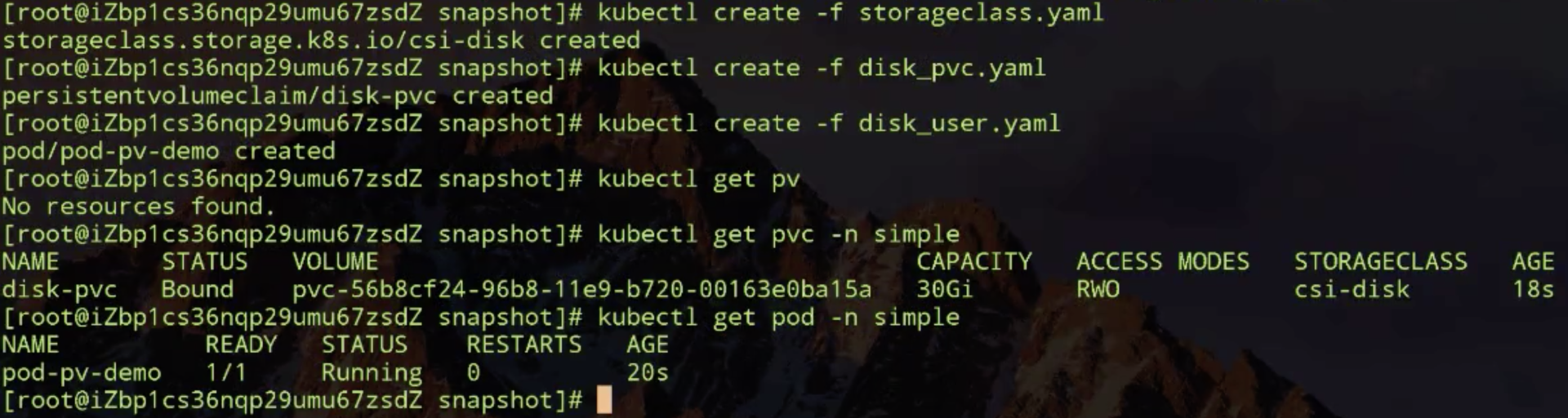
現在開始 snapshot 的演示。首先去動態創建云盤,然后才能做 snapshot。動態創建云盤需要先創建? storageclass,然后去根據 PVC 動態創建 PV,然后再創建一個使用它的 pod 了。
有個以上對象,現在就可以做 snapshot 了,首先看一下做 snapshot 需要的第一個配置文件:snapshotclass.yaml。

其實里面就是指定了在做存儲快照的時候需要使用的插件,這個插件剛才演示了已經部署好了,就是 csi-external-snapshot-0 這個插件。
接下來創建 volume-snapshotclass 文件,創建完之后就開始了 snapshot。

然后看 snapshot.yaml,Volumesnapshot 聲明創建存儲快照了,這個地方就指定剛才創建的那個 PVC 來做的數據源來做 snapshot,那我們開始創建。
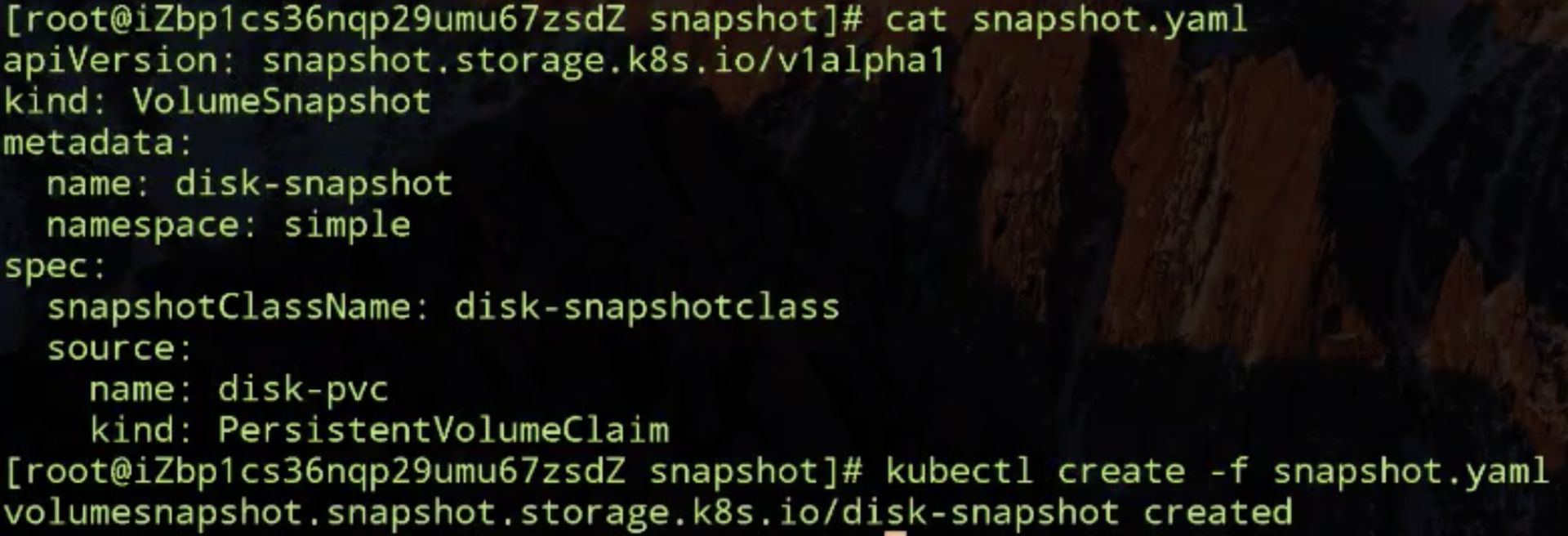
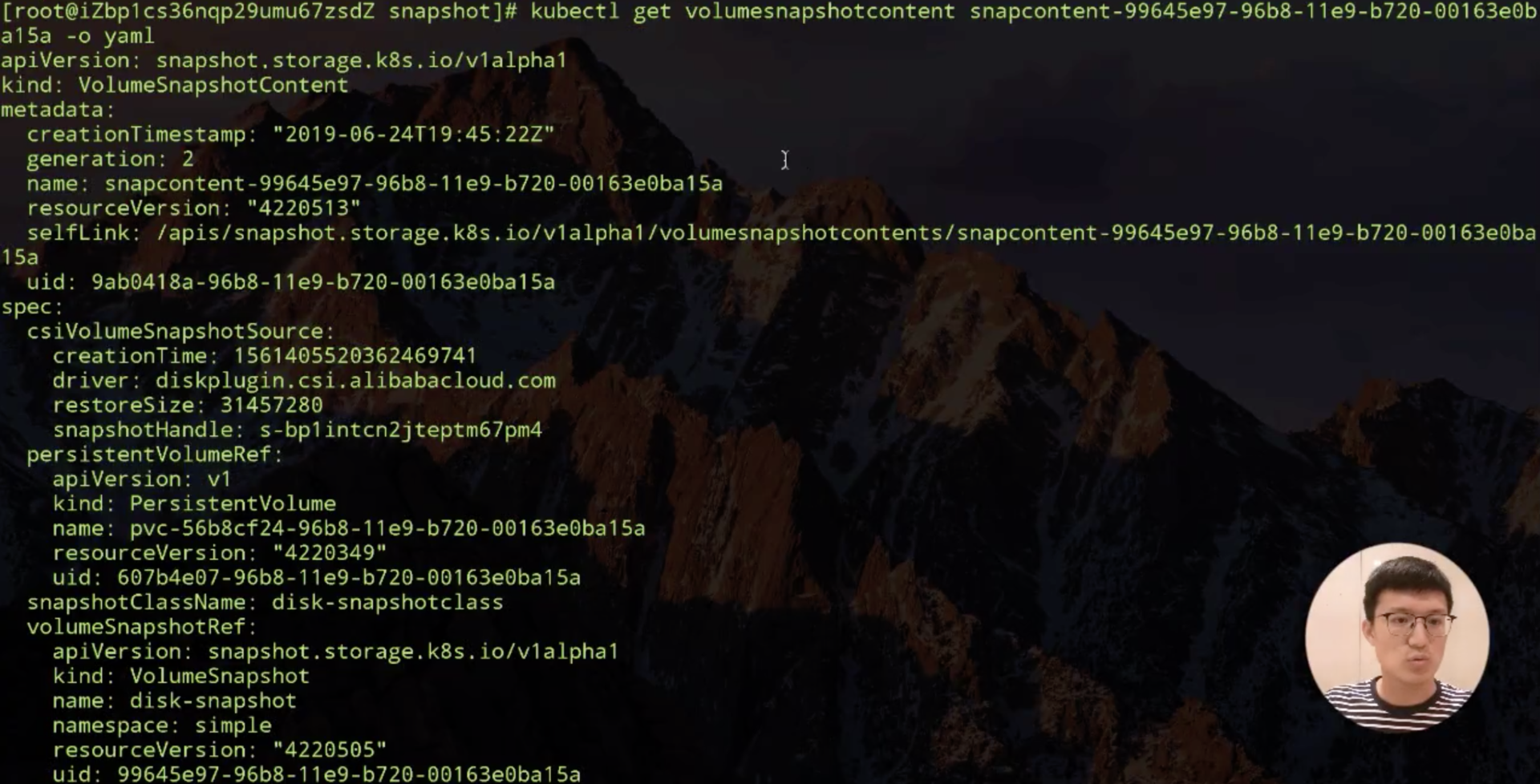
我們看一下 Snapshot 有沒有創建好,如下圖所示,content 已經在 11 秒之前創建好了。

可以看一下它里面的內容,主要看 volumesnapshotcontent 記錄的一些信息,這個是我 snapshot 出來之后,它記錄的就是云存儲廠商那邊返回給我的 snapshot 的 ID。然后是這個 snapshot 數據源,也就是剛才指定的 PVC,可以通過它會找到對應的 PV。
snapshot 的演示大概就是這樣,把剛才創建的 snapshot 刪掉,還是通過 volumesnapshot 來刪掉。然后看一下,動態創建的這個 volumesnapshotcontent 也被刪掉。

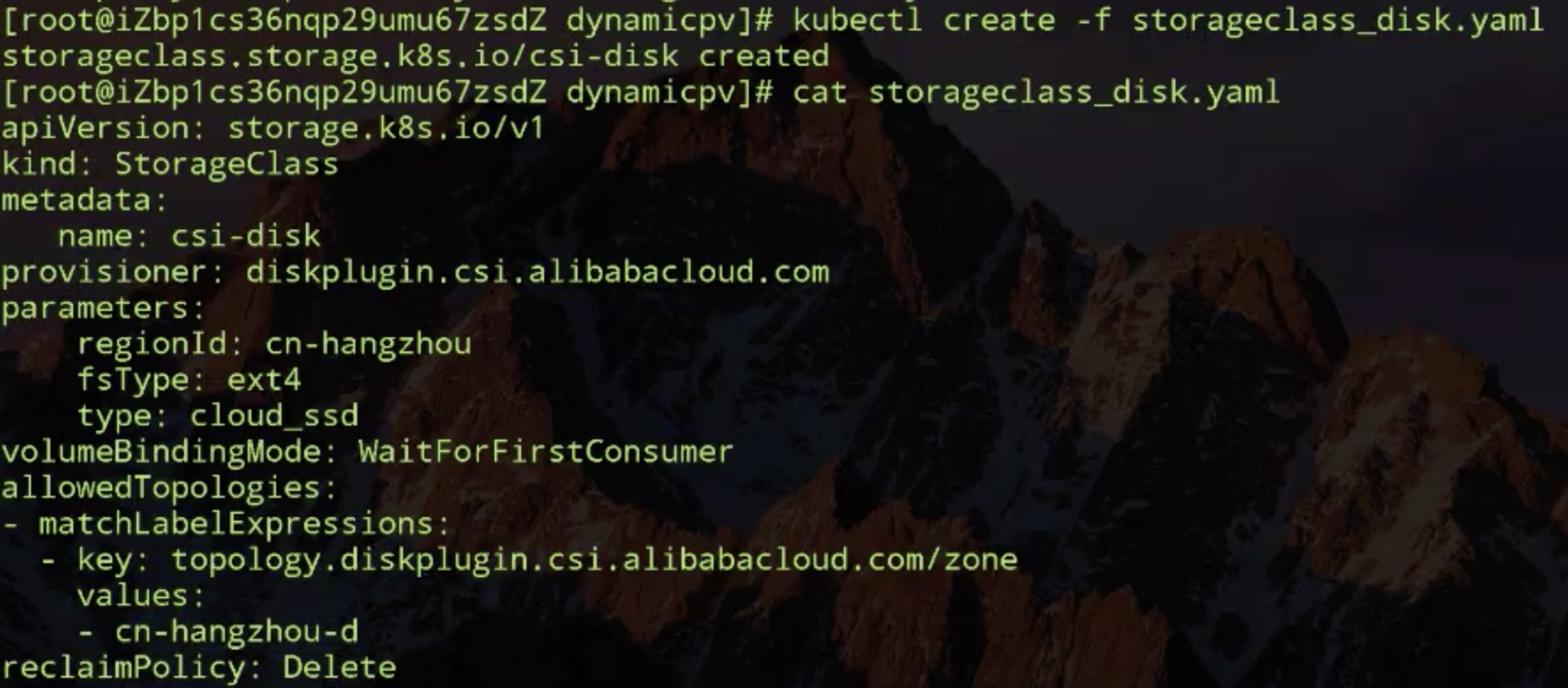
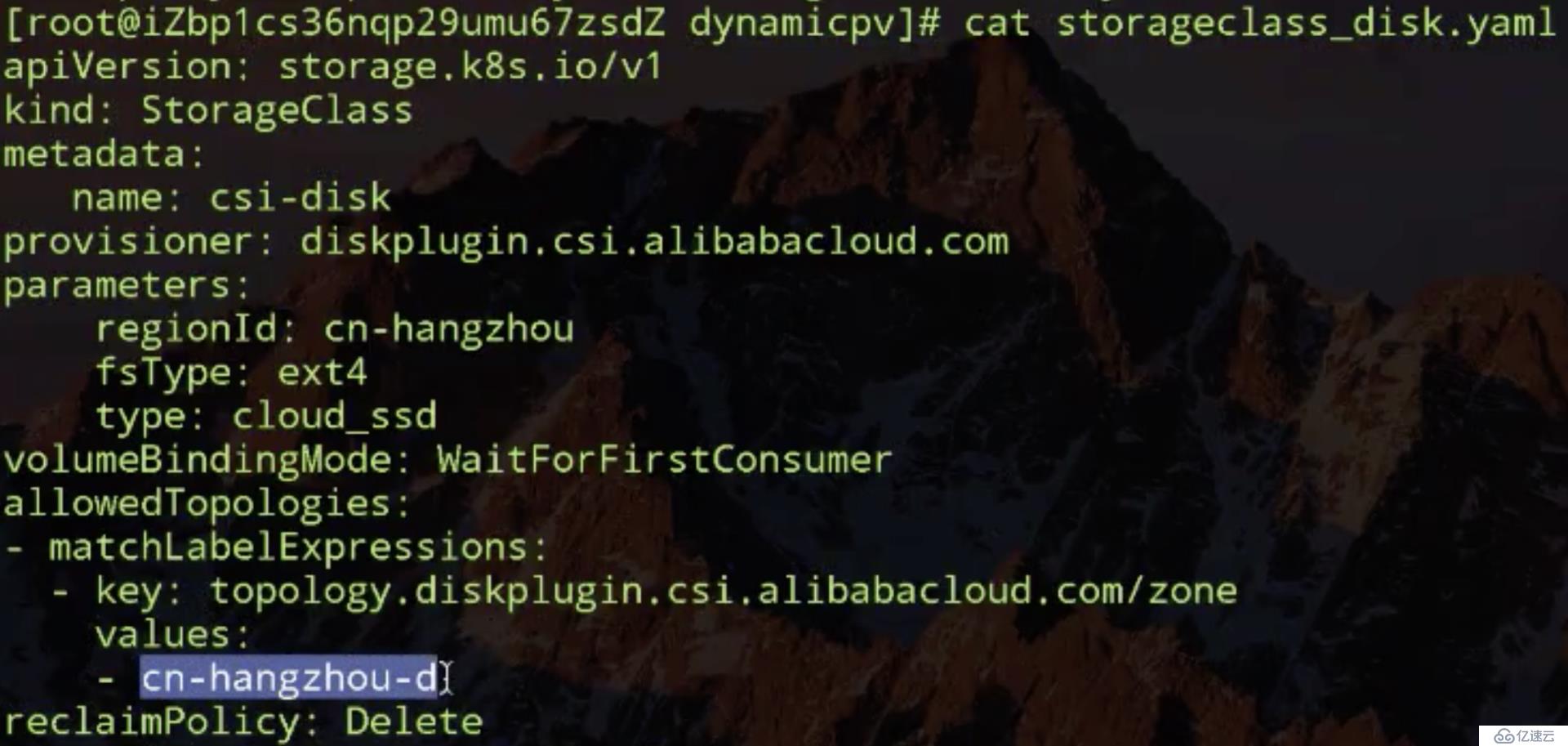
接下來看一下動態 PV 創建的過程加上一些拓撲限制,首先將的 storageclass 創建出來,然后再看一下 storageclass 里面做的限制,storageclass 首先還是指定它的 BindingMode 為 WaitForFirstConsumer,也就是做延遲綁定,然后是對它的拓撲限制,我這里面在 allowedTopologies 字段中配置了一個可用區級別的限制。
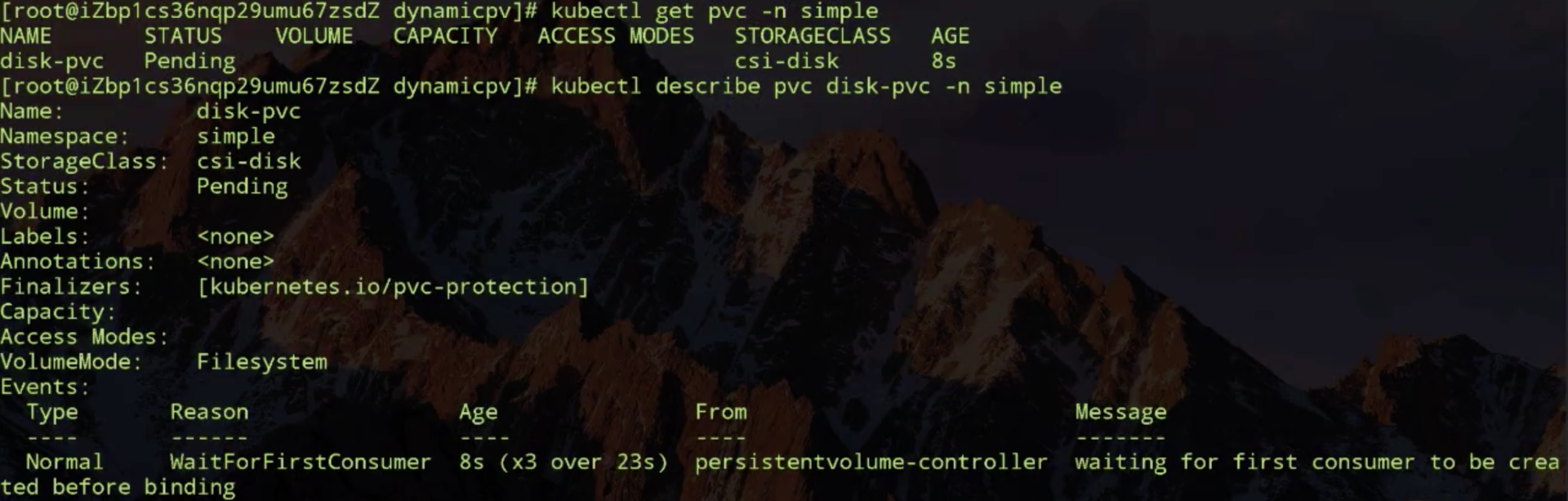
來嘗試創建一下的 PVC,PVC 創建出來之后,理論上它應該處在 pending 狀態。看一下,它現在因為它要做延遲綁定,由于現在沒有使用它的 pod,暫時沒辦法去做綁定,也沒辦法去動態創建新的 PV。
接下來創建使用該 pvc 的 pod 看會有什么效果,看一下 pod,pod 也處在 pending了。
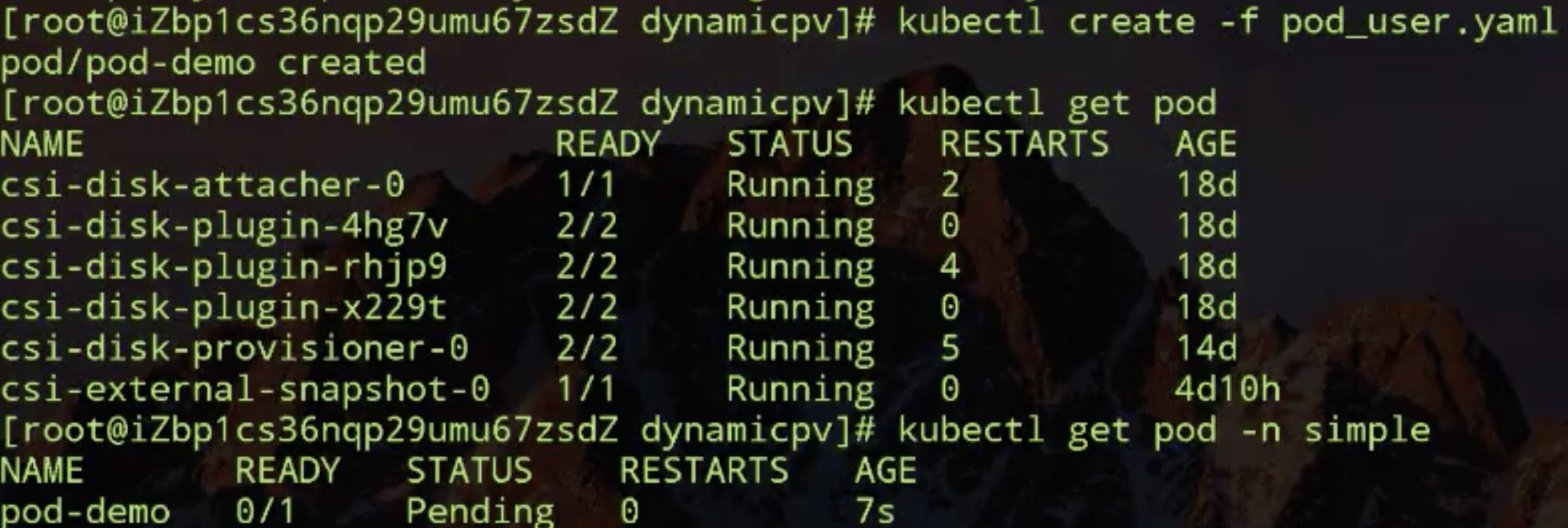
那來看一下 pod 為啥處在 pending 狀態,可以看一下是調度失敗了,調度失敗原因:一個 node 由于 taint 不能調度,這個其實是 master,另外兩個 node 也是沒有說是可綁定的 PV。

為什么會有兩個 node 出現沒有可綁定的 pv 的錯誤?不是動態創建么?
我們來仔細看看 storageclass 中的拓撲限制,通過上面的講解我們知道,這里限制使用該 storageclass 創建的 PV 存儲必須在可用區 cn-hangzhou-d 可訪問的,而使用該存儲的 pod 也必須調度到?cn-hangzhou-d 的 node 上。
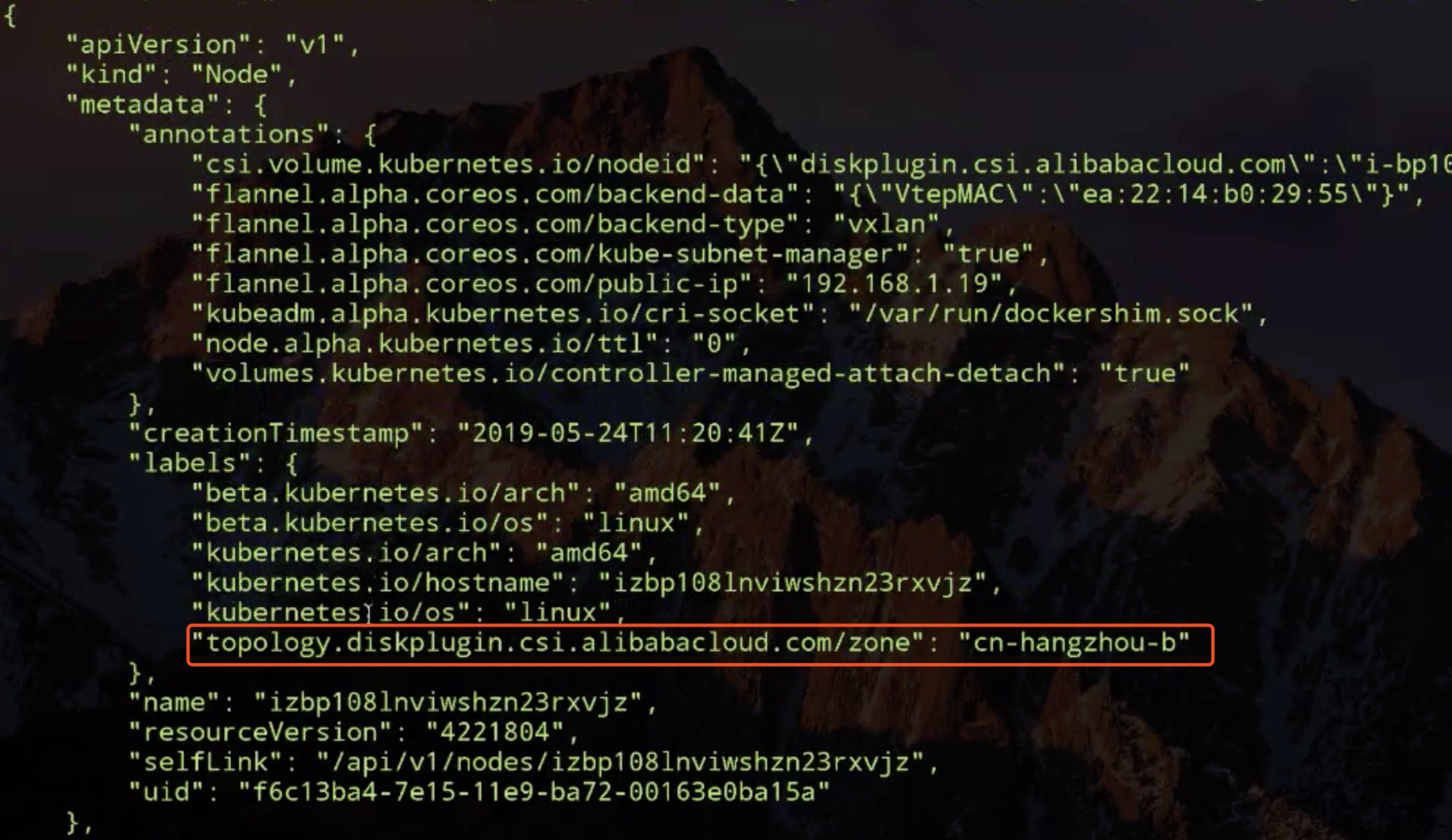
那就來看一下 node 節點上有沒有這個拓撲信息,如果它沒有當然是不行了。
看一下第一個 node 的全量信息吧,主要找它的 labels 里面的信息,看 lables 里面的確有一個這樣的 key。也就是說有一個這樣的拓撲,但是這指定是?cn-hangzhou-b,剛才 storageclass 里面指定的是?cn-hangzhou-d。
那看一下另外的一個 node 上的這個拓撲信息寫的也是 hangzhou-b,但是我們那個 storageclass 里面限制是 d。
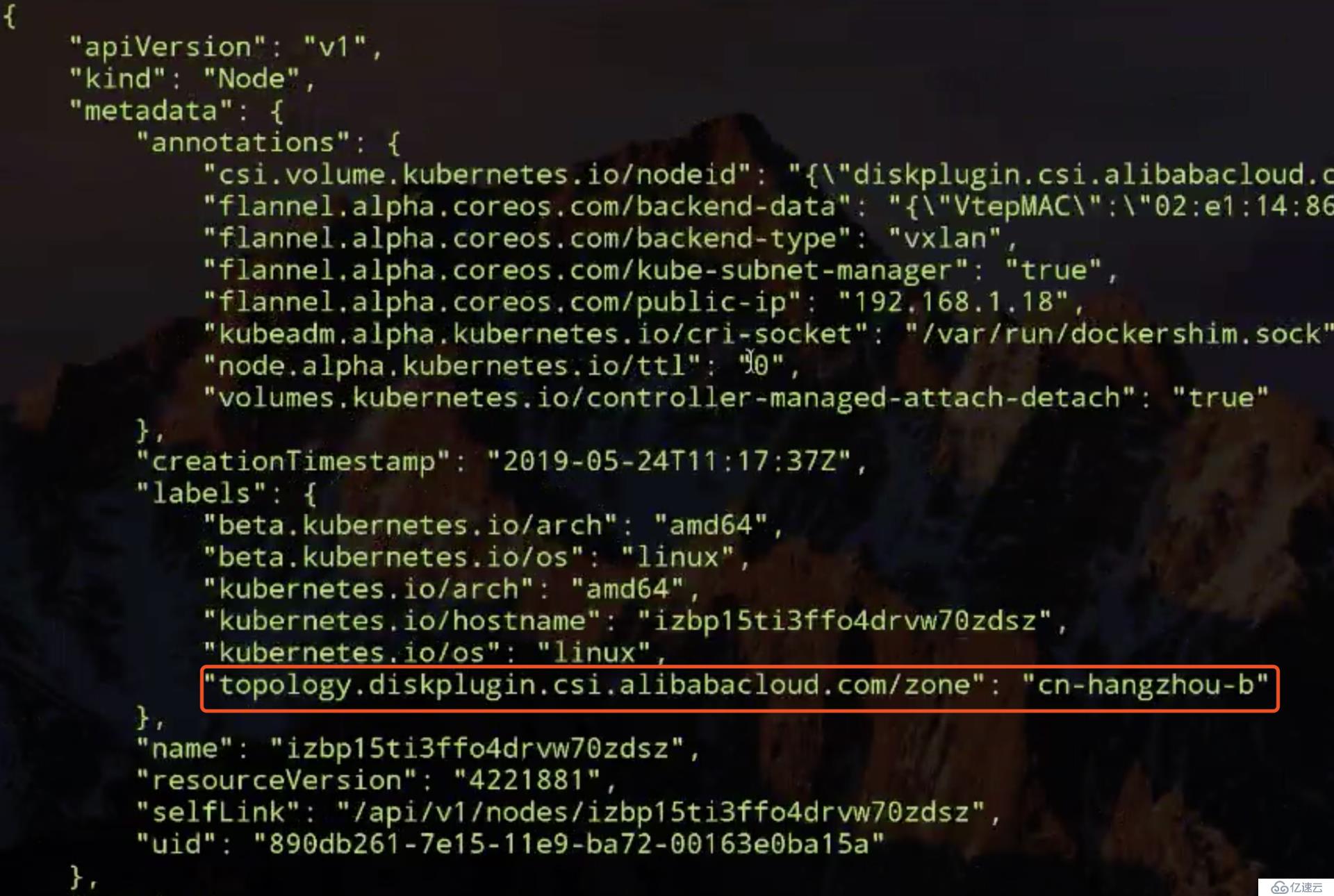
這就導致最終沒辦法將 pod 調度在這兩個 node 上。現在我們修改一下 storageclass 中的拓撲限制,將 cn-hangzhou-d 改為 cn-hangzhou-b。
改完之后再看一下,其實就是說我動態創建出來的 PV 要能被 hangzhou-b 這個可用區訪問的,使用該存儲的 pod 要調度到該可用區的 node 上。把之前的 pod 刪掉,讓它重新被調度看一下有什么結果,好,現在這個已經調度成功了,就是已經在啟動容器階段。
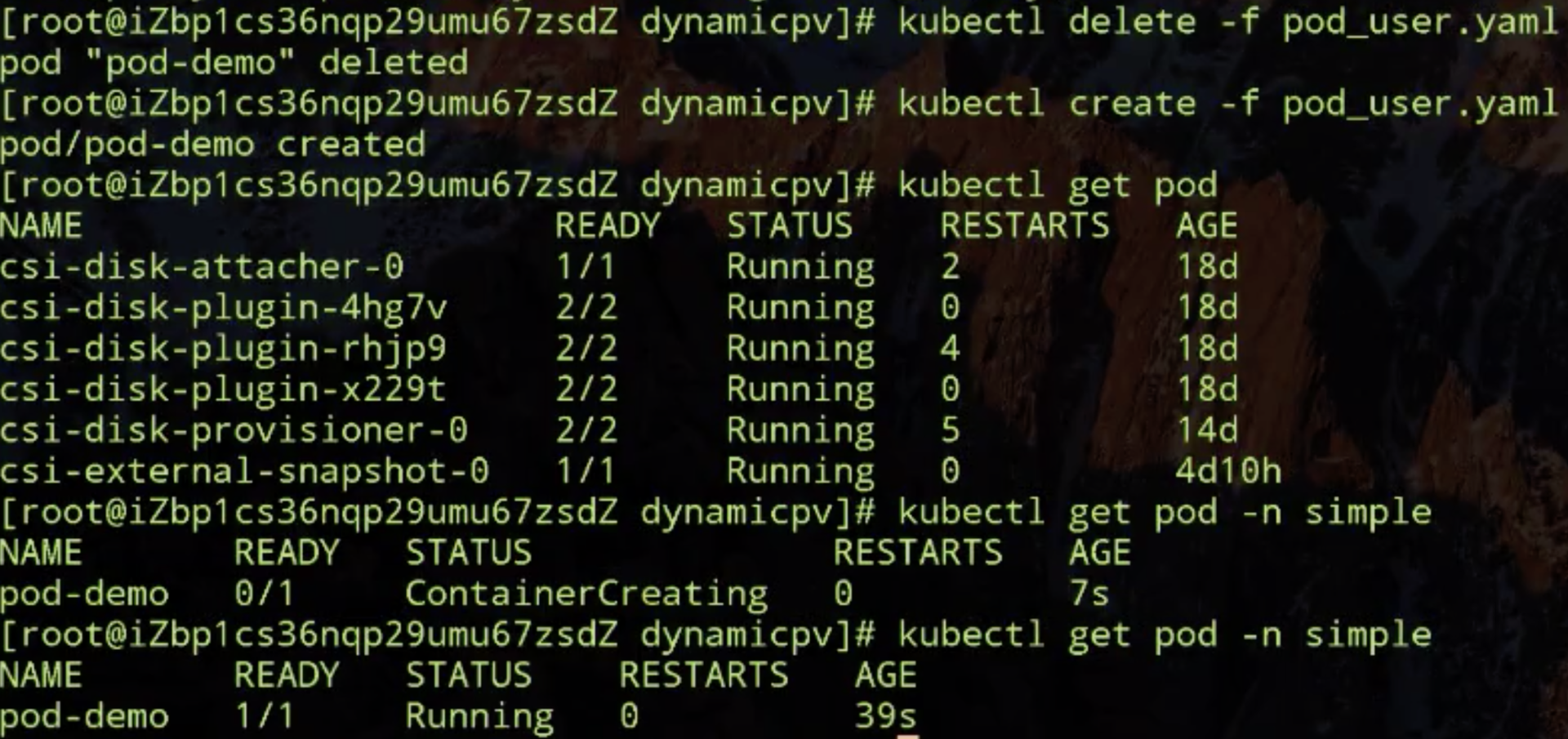
說明剛才把 storageclass 它里面的對可用區的限制從 hangzhou-d 改為 hangzhou-b 之后,集群中就有兩個 node,它的拓撲關系是和 storageclass 里要求的拓撲關系是相匹配的,這樣的話它就能保證它的 pod 是有 node 節點可調度的。上圖中最后一點 Pod 已經 Running 了,說明剛才的拓撲限制改動之后可以 work 了。
接下來看一下 K8s 中對存儲快照與拓撲調度的具體處理流程。如下圖所示:
首先來看一下存儲快照的處理流程,這里來首先解釋一下 csi 部分。K8s 中對存儲的擴展功能都是推薦通過 csi out-of-tree 的方式來實現的。
csi 實現存儲擴展主要包含兩部分:
兩部分部件通過 unix domain socket 通信連接到一起。有這兩部分,才能形成一個真正的存儲擴展功能。
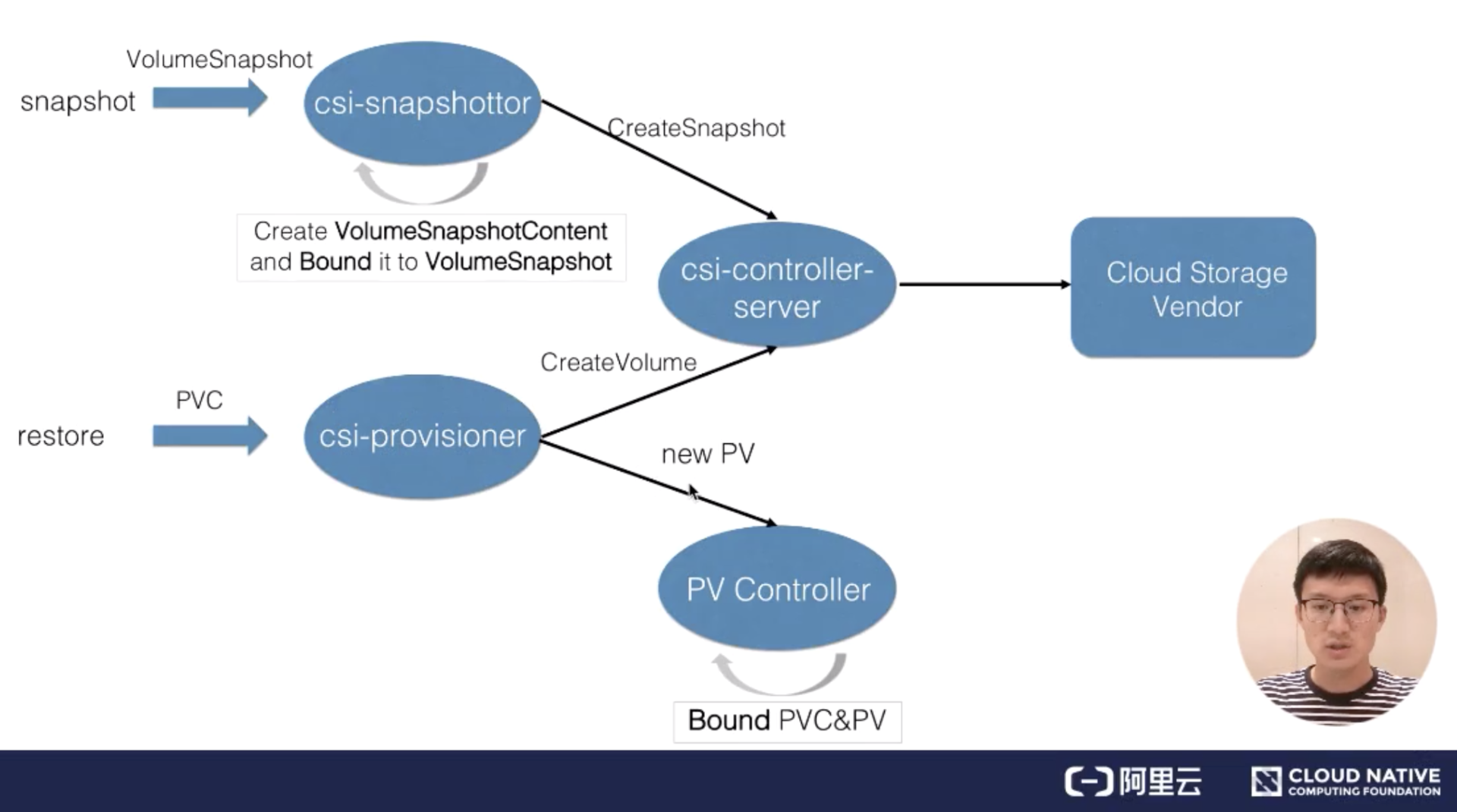
如上圖所示,當用戶提交 VolumeSnapshot 對象之后,會被 csi-snapshottor controller watch 到。之后它會通過 GPPC 調用到 csi-plugin,csi-plugin 通過 OpenAPI 來真正實現存儲快照的動作,等存儲快照已經生成之后,會返回到 csi-snapshottor controller 中,csi-snapshottor controller 會將存儲快照生成的相關信息放到 VolumeSnapshotContent 對象中并將用戶提交的 VolumeSnapshot 做 bound。這個 bound 其實就有點類似 PV 和 PVC 的 bound 一樣。
有了存儲快照,如何去使用存儲快照恢復之前的數據呢?前面也說過,通過聲明一個新的 PVC 對象,并且指定他的 dataSource 為 Snapshot 對象,當提交 PVC 的時候會被 csi-provisioner watch 到,之后會通過 GRPC 去創建存儲。這里創建存儲跟之前講解的 csi-provisioner 有一個不太一樣的地方,就是它里面還指定了 Snapshot 的 ID,當去云廠商創建存儲時,需要多做一步操作,即將之前的快照數據恢復到新創建的存儲中。之后流程返回到 csi-provisioner,它會將新創建的存儲的相關信息寫到一個新的 PV 對象中,新的 PV 對象被 PV controller watch 到它會將用戶提交的 PVC 與 PV 做一個 bound,之后 pod 就可以通過 PVC 來使用 Restore 出來的數據了。這是 K8s 中對存儲快照的處理流程。
接下來看一下存儲拓撲調度的處理流程:
第一個步驟其實就是要去聲明延遲綁定,這個通過 StorageClass 來做的,上面已經闡述過,這里就不做詳細描述了。
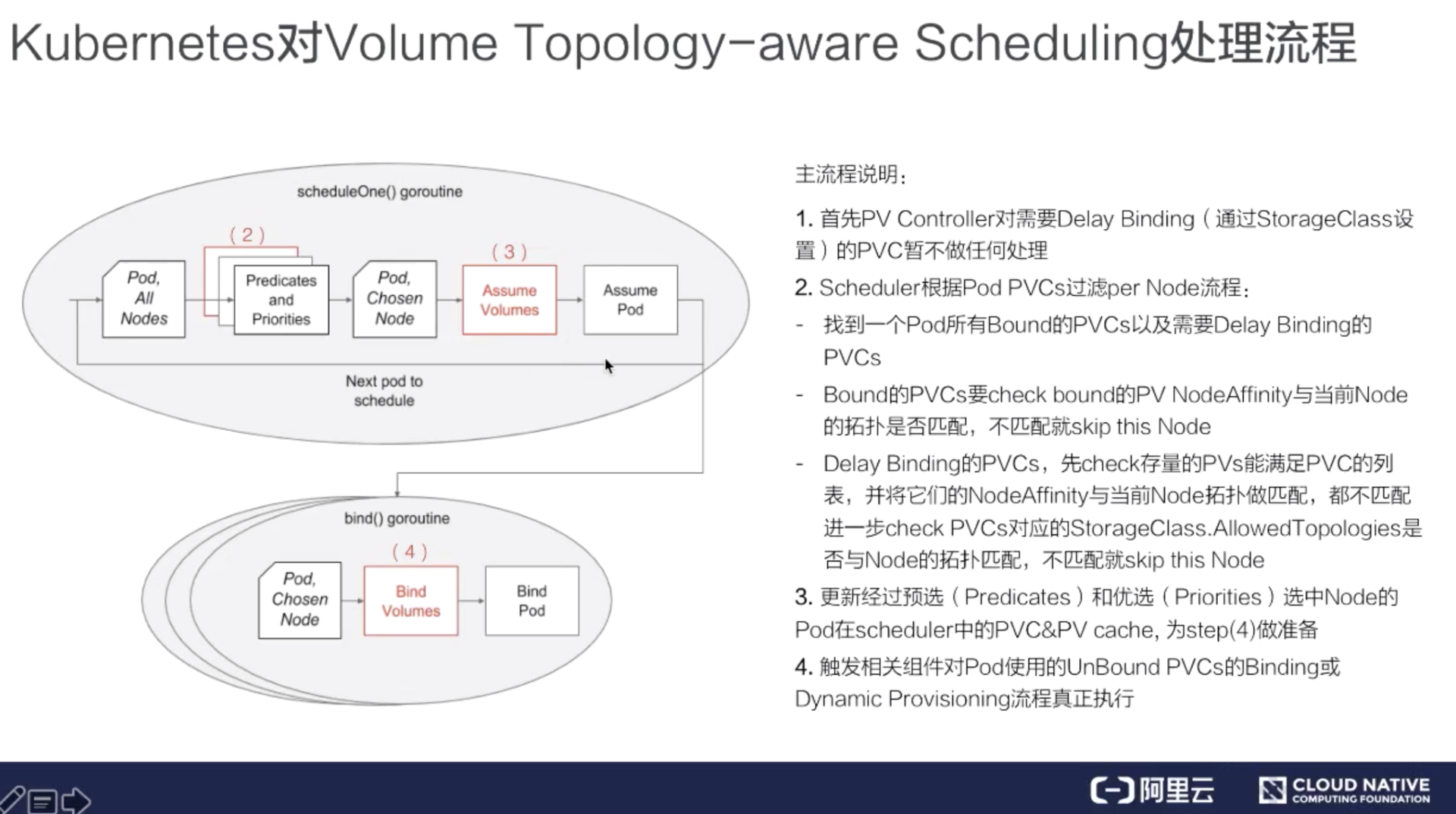
接下來看一下調度器,上圖中紅色部分就是調度器新加的存儲拓撲調度邏輯,我們先來看一下不加紅色部分時調度器的為一個 pod 選擇 node 時,它的大概流程:
那現在看一下加上卷相關的調度的時候,篩選 node(第二個步驟)又是怎么做的?
經過這上面步驟之后,就找到了所有即滿足 pod 計算資源需求又滿足 pod 存儲資源需求的所有 nodes。<br />?<br />當 node 選出來之后,第三個步驟就是調度器內部做的一個優化。這里簡單過一下,就是更新經過預選和優選之后,pod 的 node 信息,以及 PV 和 PVC 在 scheduler 中做的一些 cache 信息。
第四個步驟也是重要的一步,已經選擇出來 node 的 Pod,不管其使用的 PVC 是要 binding 已經存在的 PV,還是要做動態創建 PV,這時就可以開始做。由調度器來觸發,調度器它就會去更新 PVC 對象和 PV 對象里面的相關信息,然后去觸發 PV controller 去做 binding 操作,或者是由 csi-provisioner 去做動態創建流程。
阿里巴巴云原生微信公眾號(ID:Alicloudnative)關注微服務、Serverless、容器、Service Mesh等技術領域、聚焦云原生流行技術趨勢、云原生大規模的落地實踐,做最懂云原生開發者的技術公眾號。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





