溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
小編給大家分享一下Python如何檢測動態物體顏色,希望大家閱讀完這篇文章之后都有所收獲,下面讓我們一起去探討吧!
引言
物體檢測,是一種基于目的幾何學和統計資料特點的影像拆分,它將目的的拆分和辨識,其準確度和實時性是整個該系統的一項最重要戰斗能力。特別是在是在簡單橋段中的,必須對多個目的展開實時處理時,目的系統會萃取和辨識就變得尤其最重要。
隨著計算機的持續發展和計算機系統感官基本原理的應用,建模數據處理新技術對目的展開動態追蹤研究工作更加受歡迎,對目的展開靜態動態追蹤整合在信息化公交系統、人工智能監視該系統、軍事戰略目的檢驗及藥學導航系統手術后中的手術器械整合等各個方面具備普遍的應用于商業價值。
開始前的準備
而這里顯然我們沒必要做到如此高深的地步,而是借助python和OpenCV通過圖片相減的方法找到動態物體,然后根據像素值的大小判斷其中的均值顏色。
import cv2 import numpy as np import collections import time
下面是讀取攝像頭:
camera = cv2.VideoCapture(0)
做一些開始前的準備,包括循環次數,攝像頭內容讀入,保存上一幀的圖片作為對比作差找到動態物體,然后定義框架的長和寬。
firstframe = None
a=0
ret0,frame0 = camera.read()
cv2.imwrite("1.jpg",frame0)
x, y, w, h = 10,10,100,100下面是定義顏色的部分代碼,比如定義的黑色,可以參照hsv表進行拓展,如圖所示
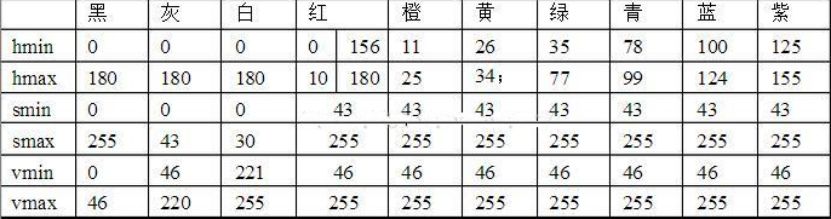
然后可以知道黑色的最低值為0,0,0,最大值為180,255,46然后建立數組存儲顏色數據,通過字典達到映射效果。
# 處理圖片
def get_color(frame):
print('go in get_color')
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
maxsum = -100
color = None
color_dict = getColorList()
for d in color_dict:
mask = cv2.inRange(frame, color_dict[d][0], color_dict[d][1])
cv2.imwrite(d + '.jpg', mask)
binary = cv2.threshold(mask, 127, 255, cv2.THRESH_BINARY)[1]
binary = cv2.dilate(binary, None, iterations=2)
img, cnts, hiera = cv2.findContours(binary.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
sum = 0
for c in cnts:
sum += cv2.contourArea(c)
if sum > maxsum:
maxsum = sum
color = d
return color圖像處理
緊接著是圖像處理,其中包括轉為灰度圖,讀取顏色字典,然后腐化膨脹操作。
# 處理圖片
def get_color(frame):
print('go in get_color')
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
maxsum = -100
color = None
color_dict = getColorList()
for d in color_dict:
mask = cv2.inRange(frame, color_dict[d][0], color_dict[d][1])
cv2.imwrite(d + '.jpg', mask)
binary = cv2.threshold(mask, 127, 255, cv2.THRESH_BINARY)[1]
binary = cv2.dilate(binary, None, iterations=2)
img, cnts, hiera = cv2.findContours(binary.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
sum = 0
for c in cnts:
sum += cv2.contourArea(c)
if sum > maxsum:
maxsum = sum
color = d
return color圖片相減的辦法
然后是圖片相減找到動態物體的代碼,每循環5次保存一次圖片,時間是很短的不用擔心。然后通過absdiff函數對圖片像素值作差找到動態物體,接著講像素值相減非零的部分用矩形框圈出來。
while True:
ret, frame = camera.read()
if not ret:
break
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray, (21, 21), 0)
a=a+1
if a%5==0:
cv2.imwrite("1.jpg", frame)
firstframe=cv2.imread("1.jpg")
firstframe= cv2.cvtColor(firstframe, cv2.COLOR_BGR2GRAY)
firstframe= cv2.GaussianBlur(firstframe, (21, 21), 0)
frameDelta = cv2.absdiff(firstframe, gray)
thresh = cv2.threshold(frameDelta, 25, 255, cv2.THRESH_BINARY)[1]
thresh = cv2.dilate(thresh, None, iterations=2)
# cnts= cv2.findContours(thresh.copy(),cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
x, y, w, h = cv2.boundingRect(thresh)
frame = cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 0, 255), 2)
cv2.imshow("frame", frame)因為保存圖片是每隔5次進行一次,在某個瞬間可能保存的圖片不存在等原因,所以需要通過try的方法避免錯誤,最終的演示效果文末有。
try:
ret0, frame0 = camera.read()
cropped = frame0[y:y+h,x:x+w ] # 裁剪坐標為[y0:y1, x0:x1]
cv2.imwrite("3.jpg", cropped)
frame1 = cv2.imread(filename)
print(get_color(frame1))
# plt.title(label[model.predict_classes(image)], fontproperties=myfont)
imgzi = cv2.putText(frame, get_color(frame1), (30, 30), cv2.FONT_HERSHEY_COMPLEX, 1.2,
(255, 255, 255), 2)
cv2.imwrite("2.jpg", imgzi)
cv2.imshow("frame", cv2.imread("2.jpg"))
except:
pass
key = cv2.waitKey(1) & 0xFF
if key == ord("q"):
break
camera.release()其最終演示效果如圖所示:

至此,動態物體檢測代碼基本實現。其中的拓展功能可以按照自己的需求進行修改、
目標檢測的發展
下面就將目標檢測發展做個簡單介紹,感興趣的朋友可以多多學習。
目標檢驗對于生物來說非常艱難,通過對照片中的有所不同色調組件的感官很更容易整合并歸類出有其中目標物體,但對于計算機系統來說,面臨的是像素分辨率行列式,難以從影像中的必要獲得貓和狗這樣的基本概念并整合其方位,再行再加通常多個物體和凌亂的復雜背景夾雜在一同,目標檢驗更為艱難。但這難不倒生物學家們,在現代感官各個領域,目的檢驗就是一個十分受歡迎的研究工作朝向,一些特定目的的檢驗,比如圖片檢驗和天橋檢驗早已有十分成熟期的新技術了。一般來說的目標檢驗也有過很多的試圖,但是視覺效果常常不錯。現代的目的檢驗一般用于轉動視窗的構建,主要還包括三個方法:
借助有所不同大小的轉動視窗框住圖中的某一部分作為候選區域內;
萃取候選區域內涉及的感官特點。比如圖片檢驗常見的Harr特點;天橋檢驗和一般來說目的檢驗常見的HOG特點等;
借助決策樹展開辨識,比如常見的SVM建模。
目的檢驗的第一步是要做到區域提名(region Proposal),也就是找到有可能的有興趣區域內(region In Risk, ROI)。區域提名類似透鏡字符識別(OCR)各個領域的重復,OCR重復常見過重復方式,非常簡單說道就是盡可能磨碎到小的相連(比如小的筆劃之類),然后再行根據鄰接塊的一些親緣特點展開拆分。但目的檢驗的單純比起OCR各個領域千差萬別,而且三維點狀,大小不等,所以一定高度上可以說道區域提名是比OCR重復更難的一個難題。
區域提名有可能的方式有:
一、轉動視窗。轉動視窗事物上就是窮舉法,借助有所不同的時間尺度和長方形比把所有有可能的大大小小的塊都窮舉出來,然后送來去辨識,辨識出來機率大的就留下。很顯著,這樣的方式復雜性太低,造成了很多的校驗候選區域內,在現實生活中不不切實際。
二、比賽規則塊。在窮舉法的為基礎展開了一些剪枝,只搭配相同的尺寸和長方形比。這在一些特定的應用于橋段是很有效地的,比如照片搜題App小猿搜題中的的簡化字檢驗,因為簡化字方方正正,長方形比多數較為完全一致,因此用比賽規則塊做到區域內獎提名是一種較為適合的自由選擇。但是對于一般來說的目的檢驗來說,比賽規則塊仍然必須采訪很多的方位,復雜性低。
三、特異性搜尋。從神經網絡的視角來說,后面的方式解任是不俗了,但是精確度不錯,所以難題的架構在于如何有效除去校驗候選區域內。只不過校驗候選區域內多數是再次發生了重合,特異性搜尋借助這一點,自底向上拆分鄰接的重合區域內,從而增加校驗。
看完了這篇文章,相信你對“Python如何檢測動態物體顏色”有了一定的了解,如果想了解更多相關知識,歡迎關注億速云行業資訊頻道,感謝各位的閱讀!
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





